#include <string>#include <opencv2/core/mat.hpp>#include <opencv2/core/matx.hpp>
Include dependency graph for utils.h:

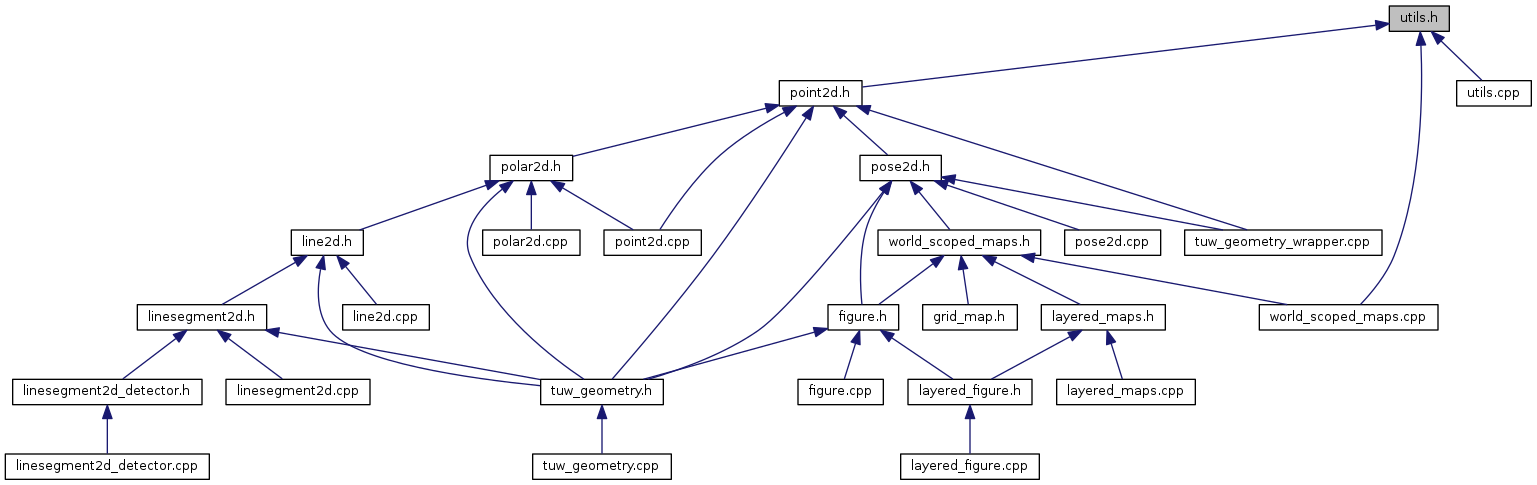
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| tuw | |
Typedefs | |
| typedef cv::Matx< double, 3, 3 > | tuw::Tf2D |
Functions | |
| double | tuw::angle_difference (double alpha0, double angle1) |
| double | tuw::angle_normalize (double angle, double min_angle=-M_PI, double max_angle=+M_PI) |
| cv::Vec< double, 3 > | tuw::append (const cv::Vec< double, 2 > &src, double value=1.0) |
| cv::Vec< double, 4 > | tuw::append (const cv::Vec< double, 3 > &src, double value=1.0) |
| template<typename Quaternion > | |
| void | tuw::EulerPitchToQuaternion (double pitch, Quaternion &q) |
| template<typename Quaternion > | |
| void | tuw::EulerToQuaternion (double roll, const Quaternion &q) |
| template<typename Quaternion > | |
| void | tuw::EulerToQuaternion (double pitch, double roll, double yaw, const Quaternion &q) |
| template<typename Quaternion > | |
| void | tuw::EulerYawToQuaternion (double yaw, Quaternion &q) |
| std::string | tuw::format (const cv::Mat_< int8_t > &m) |
| std::string | tuw::format (const cv::Mat_< int > &m) |
| std::string | tuw::format (const cv::Mat_< float > &m) |
| std::string | tuw::format (const cv::Mat_< double > &m) |
| std::string | tuw::format (const cv::Matx33d &m) |
| template<typename Quaternion > | |
| void | tuw::QuaternionToEuler (const Quaternion &q, double &roll, double &pitch, double &yaw) |
| template<typename Quaternion > | |
| void | tuw::QuaternionToPitch (const Quaternion &q, double &pitch) |
| template<typename Quaternion > | |
| void | tuw::QuaternionToRoll (const Quaternion &q, double &roll) |
| template<typename Quaternion > | |
| void | tuw::QuaternionToYaw (const Quaternion &q, double &yaw) |