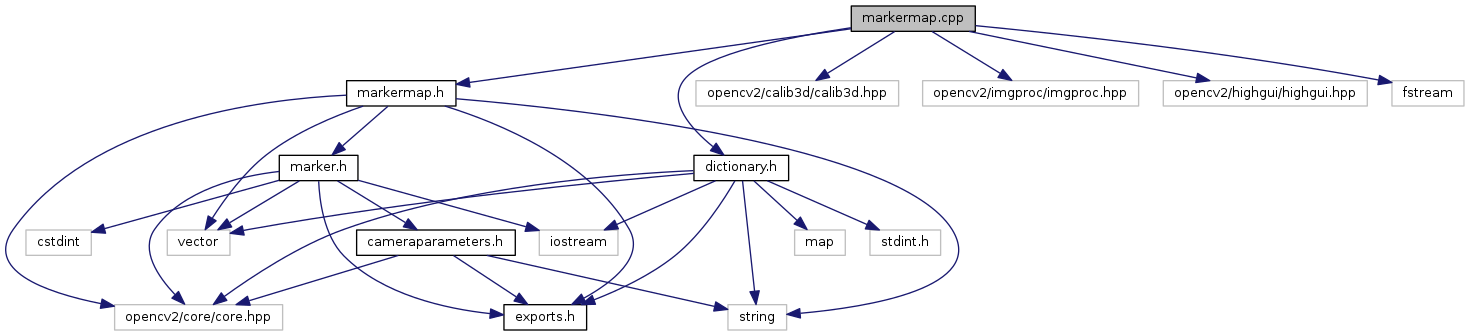
#include "markermap.h"#include <opencv2/calib3d/calib3d.hpp>#include <opencv2/imgproc/imgproc.hpp>#include <opencv2/highgui/highgui.hpp>#include <fstream>#include "dictionary.h"
Include dependency graph for markermap.cpp:
Go to the source code of this file.
Namespaces | |
| aruco | |
Functions | |
| void | aruco::__glGetModelViewMatrix (double modelview_matrix[16], const cv::Mat &Rvec, const cv::Mat &Tvec) throw (cv::Exception) |
| void | aruco::__OgreGetPoseParameters (double position[3], double orientation[4], const cv::Mat &Rvec, const cv::Mat &Tvec) throw (cv::Exception) |