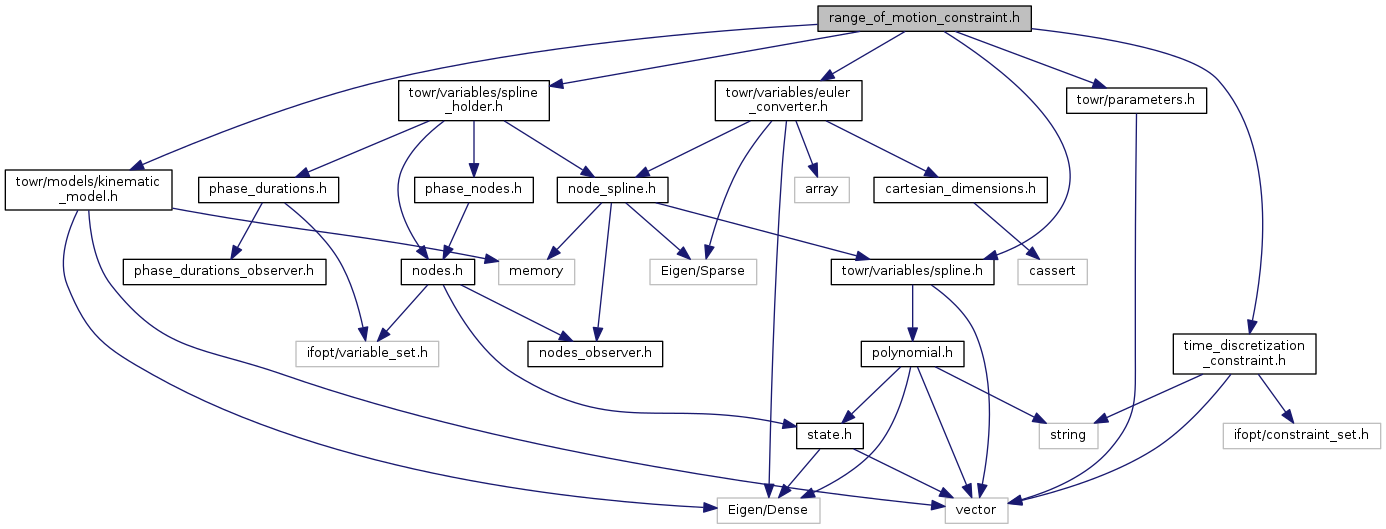
#include <towr/variables/spline.h>#include <towr/variables/spline_holder.h>#include <towr/variables/euler_converter.h>#include <towr/models/kinematic_model.h>#include <towr/parameters.h>#include "time_discretization_constraint.h"
Include dependency graph for range_of_motion_constraint.h:
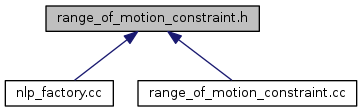
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | towr::RangeOfMotionConstraint |
| Constrains an endeffector to lie in a box around the nominal stance. More... | |
Namespaces | |
| towr | |