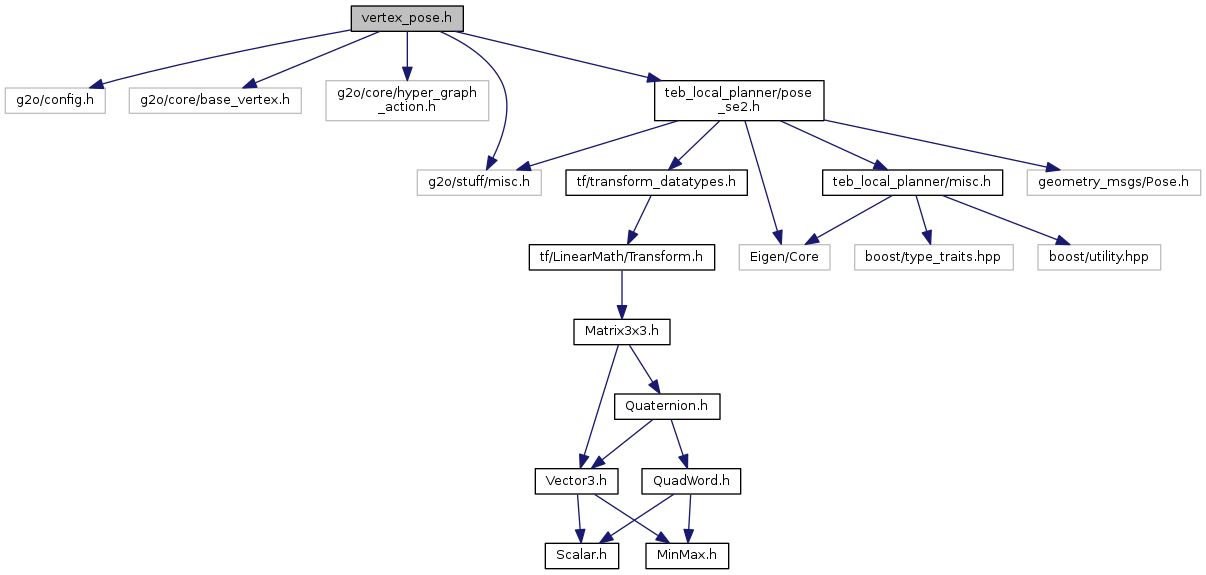
#include <g2o/config.h>#include <g2o/core/base_vertex.h>#include <g2o/core/hyper_graph_action.h>#include <g2o/stuff/misc.h>#include <teb_local_planner/pose_se2.h>
Include dependency graph for vertex_pose.h:
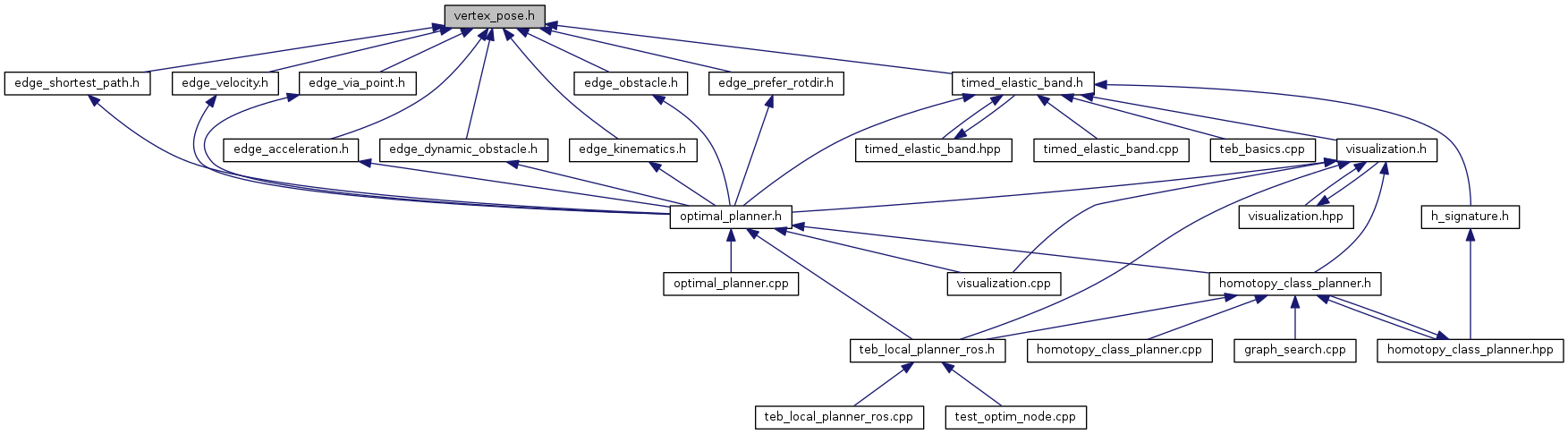
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | teb_local_planner::VertexPose |
| This class stores and wraps a SE2 pose (position and orientation) into a vertex that can be optimized via g2o. More... | |
Namespaces | |
| teb_local_planner | |