#include <ros/ros.h>#include <ros/assert.h>#include <geometry_msgs/PoseStamped.h>#include <geometry_msgs/PoseArray.h>#include <tf/tf.h>#include <complex>#include <iterator>#include <teb_local_planner/obstacles.h>#include <teb_local_planner/g2o_types/vertex_pose.h>#include <teb_local_planner/g2o_types/vertex_timediff.h>#include <teb_local_planner/timed_elastic_band.hpp>
Include dependency graph for timed_elastic_band.h:

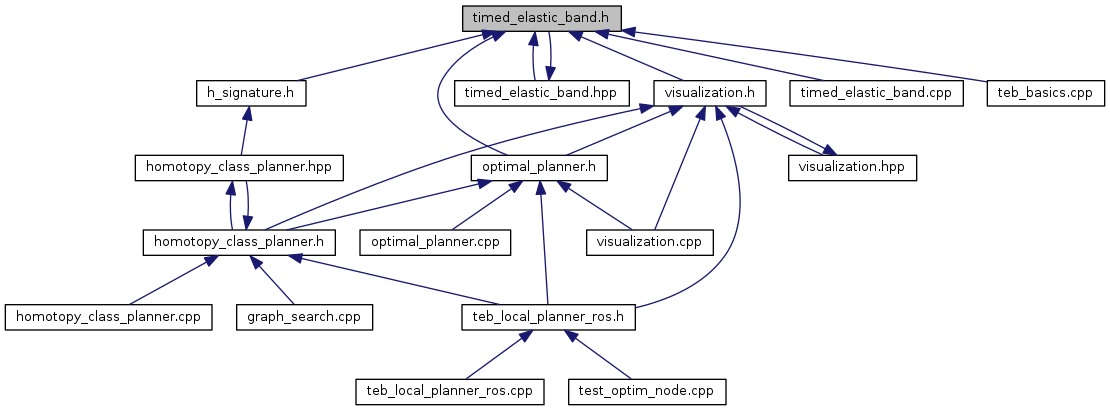
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | teb_local_planner::TimedElasticBand |
| Class that defines a trajectory modeled as an elastic band with augmented tempoarl information. More... | |
Namespaces | |
| teb_local_planner | |
Typedefs | |
| typedef std::vector< VertexPose * > | teb_local_planner::PoseSequence |
| Container of poses that represent the spatial part of the trajectory. More... | |
| typedef std::vector< VertexTimeDiff * > | teb_local_planner::TimeDiffSequence |
| Container of time differences that define the temporal of the trajectory. More... | |