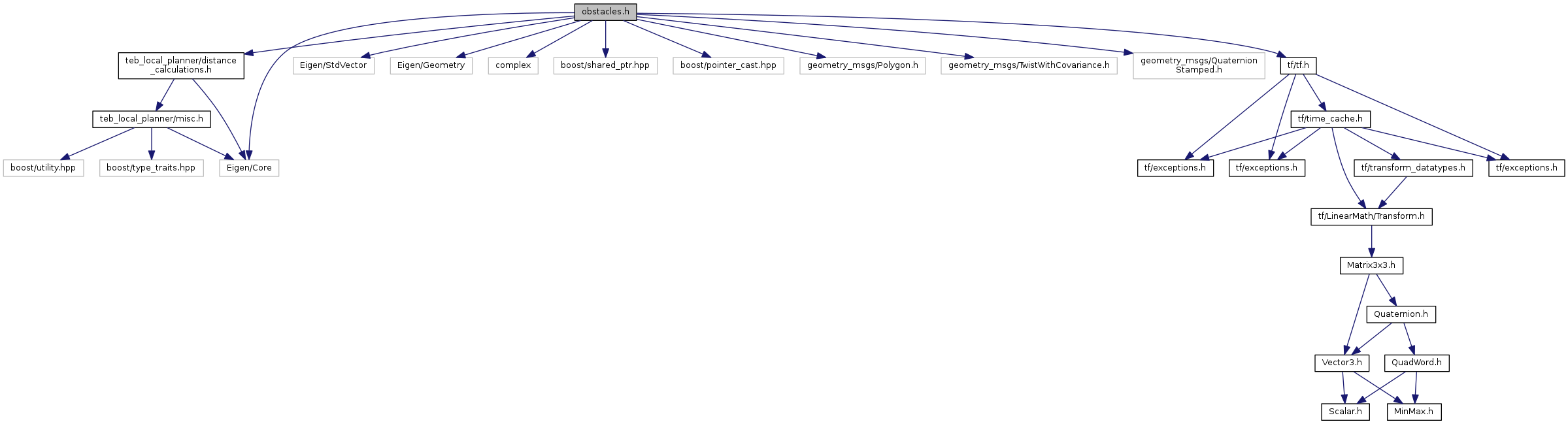
#include <Eigen/Core>#include <Eigen/StdVector>#include <Eigen/Geometry>#include <complex>#include <boost/shared_ptr.hpp>#include <boost/pointer_cast.hpp>#include <geometry_msgs/Polygon.h>#include <geometry_msgs/TwistWithCovariance.h>#include <geometry_msgs/QuaternionStamped.h>#include <tf/tf.h>#include <teb_local_planner/distance_calculations.h>
Include dependency graph for obstacles.h:
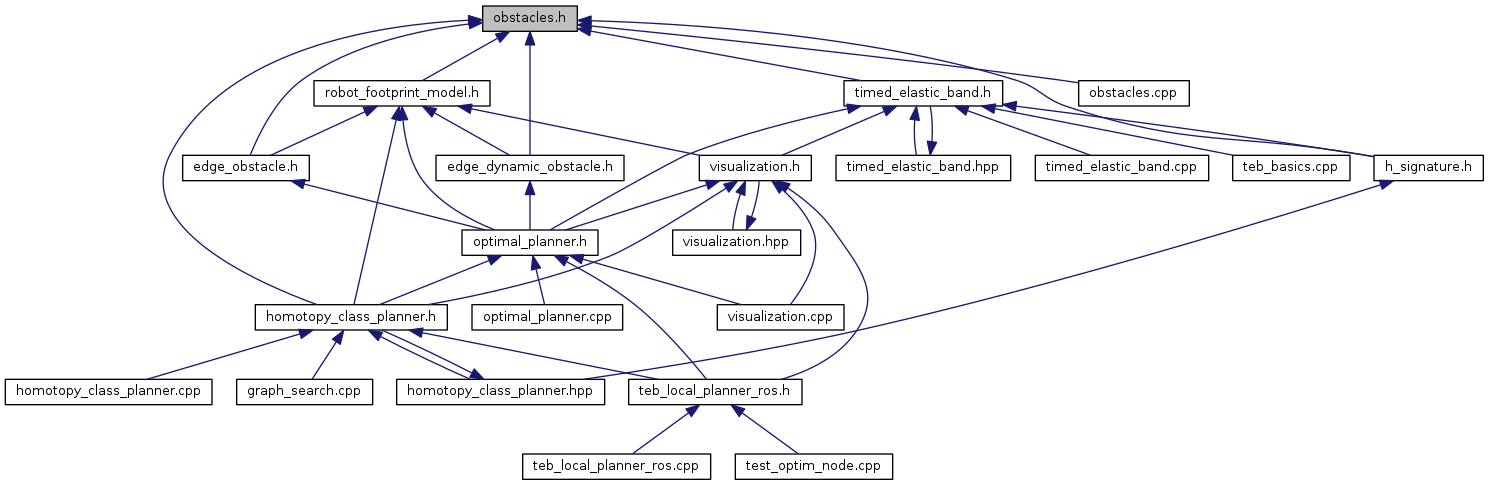
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | teb_local_planner::CircularObstacle |
| Implements a 2D circular obstacle (point obstacle plus radius) More... | |
| class | teb_local_planner::LineObstacle |
| Implements a 2D line obstacle. More... | |
| class | teb_local_planner::Obstacle |
| Abstract class that defines the interface for modelling obstacles. More... | |
| class | teb_local_planner::PointObstacle |
| Implements a 2D point obstacle. More... | |
| class | teb_local_planner::PolygonObstacle |
| Implements a polygon obstacle with an arbitrary number of vertices. More... | |
Namespaces | |
| teb_local_planner | |
Typedefs | |
| typedef boost::shared_ptr< const Obstacle > | teb_local_planner::ObstacleConstPtr |
| Abbrev. for shared obstacle const pointers. More... | |
| typedef boost::shared_ptr< Obstacle > | teb_local_planner::ObstaclePtr |
| Abbrev. for shared obstacle pointers. More... | |
| typedef std::vector< ObstaclePtr > | teb_local_planner::ObstContainer |
| Abbrev. for containers storing multiple obstacles. More... | |