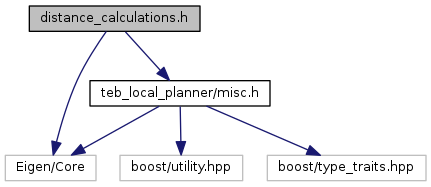
Include dependency graph for distance_calculations.h:
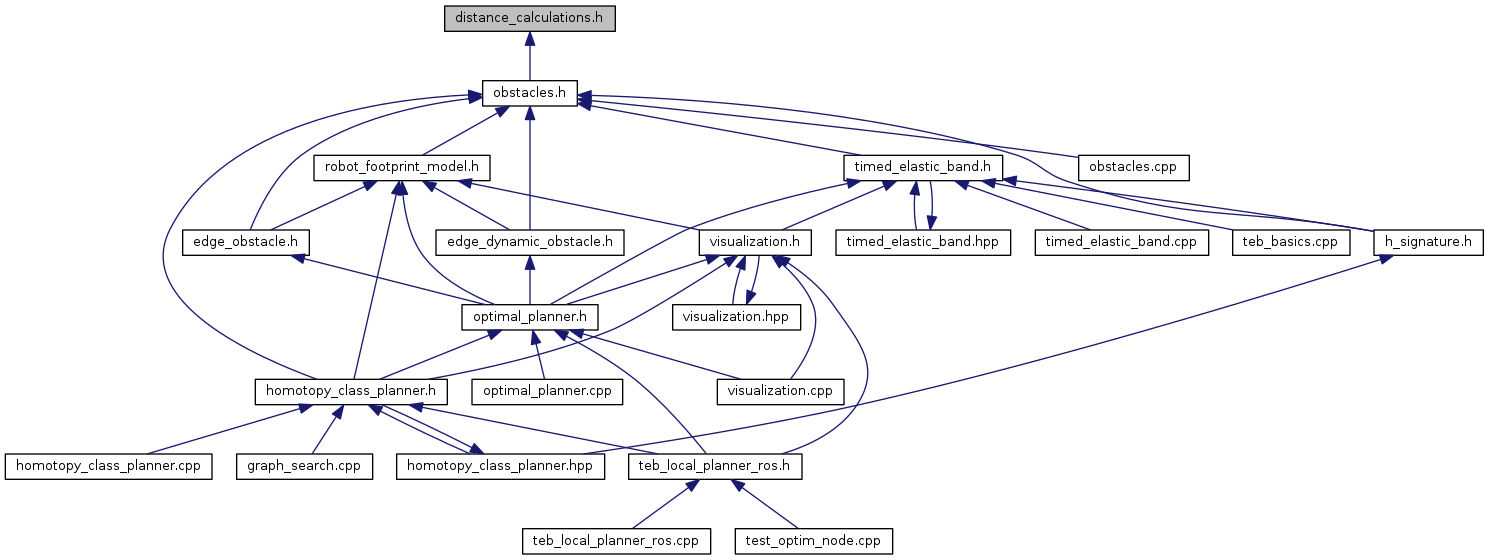
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| teb_local_planner | |
Typedefs | |
| typedef std::vector< Eigen::Vector2d, Eigen::aligned_allocator< Eigen::Vector2d > > | teb_local_planner::Point2dContainer |
| Abbrev. for a container storing 2d points. More... | |
Functions | |
| template<typename VectorType > | |
| double | teb_local_planner::calc_closest_point_to_approach_distance (const VectorType &x1, const VectorType &vel1, const VectorType &x2, const VectorType &vel2, double bound_cpa_time=0) |
| template<typename VectorType > | |
| double | teb_local_planner::calc_closest_point_to_approach_time (const VectorType &x1, const VectorType &vel1, const VectorType &x2, const VectorType &vel2) |
| double | teb_local_planner::calc_distance_line_to_line_3d (const Eigen::Ref< const Eigen::Vector3d > &x1, Eigen::Ref< const Eigen::Vector3d > &u, const Eigen::Ref< const Eigen::Vector3d > &x2, Eigen::Ref< const Eigen::Vector3d > &v) |
| template<typename VectorType > | |
| double | teb_local_planner::calc_distance_point_to_line (const VectorType &point, const VectorType &line_base, const VectorType &line_dir) |
| template<typename VectorType > | |
| double | teb_local_planner::calc_distance_point_to_segment (const VectorType &point, const VectorType &line_start, const VectorType &line_end) |
| double | teb_local_planner::calc_distance_segment_to_segment3D (const Eigen::Ref< const Eigen::Vector3d > &line1_start, Eigen::Ref< const Eigen::Vector3d > &line1_end, const Eigen::Ref< const Eigen::Vector3d > &line2_start, Eigen::Ref< const Eigen::Vector3d > &line2_end) |
| bool | teb_local_planner::check_line_segments_intersection_2d (const Eigen::Ref< const Eigen::Vector2d > &line1_start, const Eigen::Ref< const Eigen::Vector2d > &line1_end, const Eigen::Ref< const Eigen::Vector2d > &line2_start, const Eigen::Ref< const Eigen::Vector2d > &line2_end, Eigen::Vector2d *intersection=NULL) |
| Helper function to check whether two line segments intersects. More... | |
| Eigen::Vector2d | teb_local_planner::closest_point_on_line_segment_2d (const Eigen::Ref< const Eigen::Vector2d > &point, const Eigen::Ref< const Eigen::Vector2d > &line_start, const Eigen::Ref< const Eigen::Vector2d > &line_end) |
| Helper function to obtain the closest point on a line segment w.r.t. a reference point. More... | |
| double | teb_local_planner::distance_point_to_polygon_2d (const Eigen::Vector2d &point, const Point2dContainer &vertices) |
| Helper function to calculate the smallest distance between a point and a closed polygon. More... | |
| double | teb_local_planner::distance_point_to_segment_2d (const Eigen::Ref< const Eigen::Vector2d > &point, const Eigen::Ref< const Eigen::Vector2d > &line_start, const Eigen::Ref< const Eigen::Vector2d > &line_end) |
| Helper function to calculate the distance between a line segment and a point. More... | |
| double | teb_local_planner::distance_polygon_to_polygon_2d (const Point2dContainer &vertices1, const Point2dContainer &vertices2) |
| Helper function to calculate the smallest distance between two closed polygons. More... | |
| double | teb_local_planner::distance_segment_to_polygon_2d (const Eigen::Vector2d &line_start, const Eigen::Vector2d &line_end, const Point2dContainer &vertices) |
| Helper function to calculate the smallest distance between a line segment and a closed polygon. More... | |
| double | teb_local_planner::distance_segment_to_segment_2d (const Eigen::Ref< const Eigen::Vector2d > &line1_start, const Eigen::Ref< const Eigen::Vector2d > &line1_end, const Eigen::Ref< const Eigen::Vector2d > &line2_start, const Eigen::Ref< const Eigen::Vector2d > &line2_end) |
| Helper function to calculate the smallest distance between two line segments. More... | |