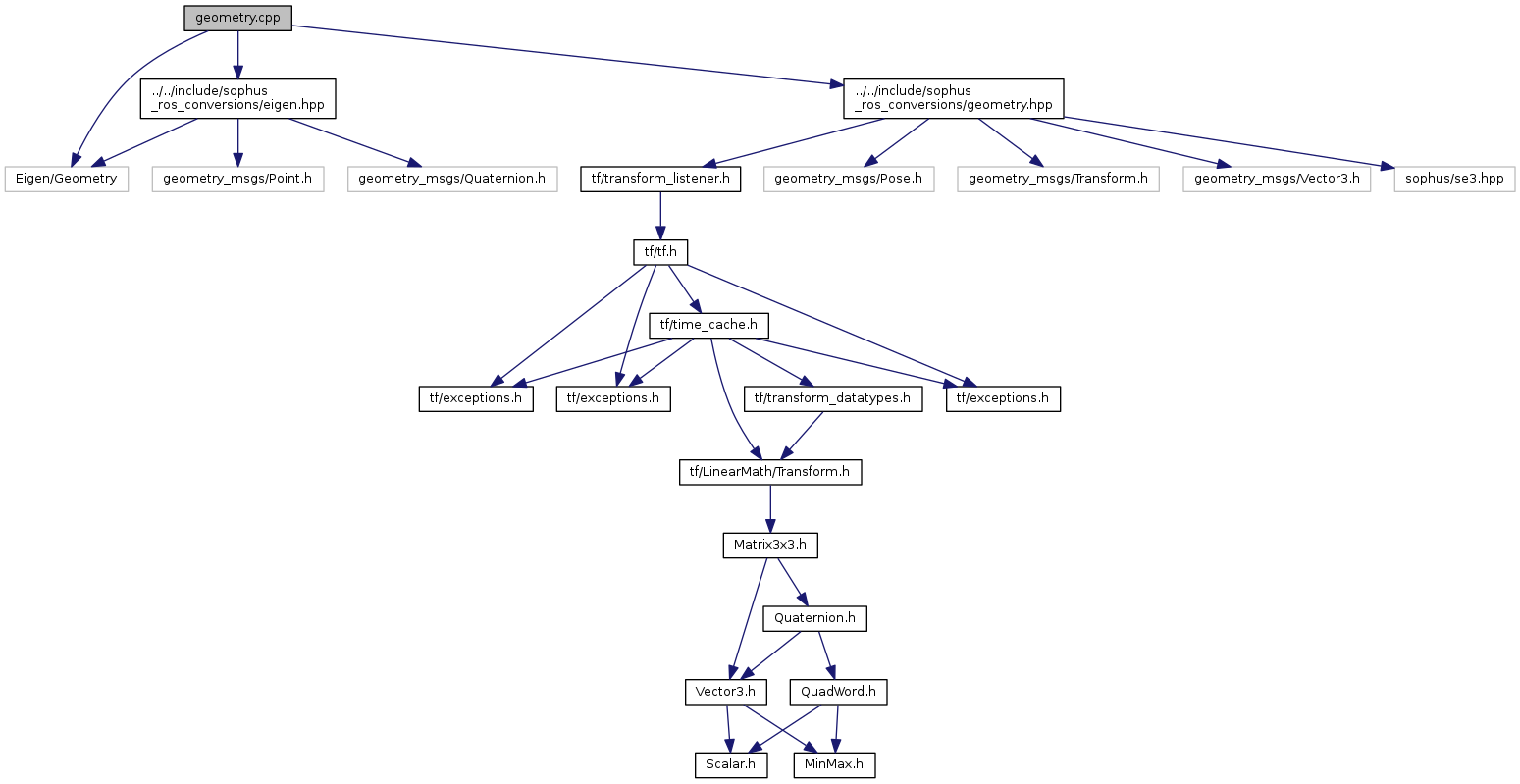
#include <Eigen/Geometry>#include "../../include/sophus_ros_conversions/eigen.hpp"#include "../../include/sophus_ros_conversions/geometry.hpp"
Include dependency graph for geometry.cpp:
Go to the source code of this file.
Namespaces | |
| sophus_ros_conversions | |
Functions | |
| void | sophus_ros_conversions::poseMsgToSophus (const geometry_msgs::Pose &p, Sophus::SE3f &s) |
| geometry_msgs::Pose | sophus_ros_conversions::sophusToPoseMsg (const Sophus::SE3f &s) |
| geometry_msgs::Transform | sophus_ros_conversions::sophusToTransformMsg (const Sophus::SE3f &se3) |
| void | sophus_ros_conversions::transformMsgToSophus (const geometry_msgs::Transform &transform, Sophus::SE3f &se3) |
| Sophus::SE3f | sophus_ros_conversions::transformMsgToSophus (const geometry_msgs::Transform &transform) |
| void | sophus_ros_conversions::vector3MsgToSophus (const geometry_msgs::Vector3 &v, Sophus::SE3f::Point &translation) |