#include <effort_display.h>
Public Types | |
| typedef boost::function< void(const MConstPtr &, FilterFailureReason)> | FailureCallback |
| typedef boost::signals2::signal< void(const MConstPtr &, FilterFailureReason)> | FailureSignal |
| typedef boost::shared_ptr< M const > | MConstPtr |
| typedef ros::MessageEvent< M const > | MEvent |
 Public Types inherited from tf::MessageFilter< sensor_msgs::JointState > Public Types inherited from tf::MessageFilter< sensor_msgs::JointState > | |
| typedef boost::function< void(const MConstPtr &, FilterFailureReason)> | FailureCallback |
| typedef boost::signals2::signal< void(const MConstPtr &, FilterFailureReason)> | FailureSignal |
| typedef boost::shared_ptr< sensor_msgs::JointStateconst > | MConstPtr |
| typedef ros::MessageEvent< sensor_msgs::JointStateconst > | MEvent |
Public Member Functions | |
| void | add (const MEvent &evt) |
| void | add (const MConstPtr &message) |
| Manually add a message into this filter. More... | |
| void | clear () |
| Clear any messages currently in the queue. More... | |
| template<class F > | |
| void | connectInput (F &f) |
| Connect this filter's input to another filter's output. If this filter is already connected, disconnects first. More... | |
| virtual uint32_t | getQueueSize () |
| std::string | getTargetFramesString () |
| Get the target frames as a string for debugging. More... | |
| MessageFilterJointState (Transformer &tf, const std::string &target_frame, uint32_t queue_size, ros::NodeHandle nh=ros::NodeHandle(), ros::Duration max_rate=ros::Duration(0.01)) | |
| Constructor. More... | |
| template<class F > | |
| MessageFilterJointState (F &f, Transformer &tf, const std::string &target_frame, uint32_t queue_size, ros::NodeHandle nh=ros::NodeHandle(), ros::Duration max_rate=ros::Duration(0.01)) | |
| Constructor. More... | |
| message_filters::Connection | registerFailureCallback (const FailureCallback &callback) |
| Register a callback to be called when a message is about to be dropped. More... | |
| ROS_STATIC_ASSERT (ros::message_traits::HasHeader< M >::value) | |
| virtual void | setQueueSize (uint32_t new_queue_size) |
| void | setTargetFrame (const std::string &target_frame) |
| Set the frame you need to be able to transform to before getting a message callback. More... | |
| void | setTargetFrames (const std::vector< std::string > &target_frames) |
| Set the frames you need to be able to transform to before getting a message callback. More... | |
| void | setTolerance (const ros::Duration &tolerance) |
| Set the required tolerance for the notifier to return true. More... | |
| ~MessageFilterJointState () | |
| Destructor. More... | |
| Public Member Functions inherited from tf::MessageFilter< sensor_msgs::JointState > | |
| void | add (const MEvent &evt) |
| void | add (const MConstPtr &message) |
| void | clear () |
| void | connectInput (F &f) |
| std::string | getTargetFramesString () |
| MessageFilter (F &f, Transformer &tf, const std::string &target_frame, uint32_t queue_size, ros::NodeHandle nh=ros::NodeHandle(), ros::Duration max_rate=ros::Duration(0.01)) | |
| MessageFilter (Transformer &tf, const std::string &target_frame, uint32_t queue_size, ros::NodeHandle nh=ros::NodeHandle(), ros::Duration max_rate=ros::Duration(0.01)) | |
| message_filters::Connection | registerFailureCallback (const FailureCallback &callback) |
| void | setTargetFrame (const std::string &target_frame) |
| void | setTargetFrames (const std::vector< std::string > &target_frames) |
| void | setTolerance (const ros::Duration &tolerance) |
| ~MessageFilter () | |
| Public Member Functions inherited from tf::MessageFilterBase | |
| virtual | ~MessageFilterBase () |
Private Types | |
| typedef std::list< MEvent > | L_Event |
| typedef sensor_msgs::JointState | M |
Private Member Functions | |
| void | checkFailures () |
| void | disconnectFailure (const message_filters::Connection &c) |
| void | incomingMessage (const ros::MessageEvent< M const > &evt) |
| Callback that happens when we receive a message on the message topic. More... | |
| void | init () |
| void | maxRateTimerCallback (const ros::TimerEvent &) |
| void | signalFailure (const MEvent &evt, FilterFailureReason reason) |
| bool | testMessage (const MEvent &evt) |
| void | testMessages () |
| void | transformsChanged () |
Private Attributes | |
| uint64_t | dropped_message_count_ |
| uint64_t | failed_out_the_back_count_ |
| uint64_t | failed_transform_count_ |
| FailureSignal | failure_signal_ |
| boost::mutex | failure_signal_mutex_ |
| uint64_t | incoming_message_count_ |
| std::string | last_out_the_back_frame_ |
| ros::Time | last_out_the_back_stamp_ |
| ros::Duration | max_rate_ |
| ros::Timer | max_rate_timer_ |
| message_filters::Connection | message_connection_ |
| uint32_t | message_count_ |
| The number of messages in the list. Used because messages_.size() has linear cost. More... | |
| L_Event | messages_ |
| The message list. More... | |
| boost::mutex | messages_mutex_ |
| The mutex used for locking message list operations. More... | |
| bool | new_messages_ |
| Used to skip waiting on new_data_ if new messages have come in while calling back. More... | |
| volatile bool | new_transforms_ |
| Used to skip waiting on new_data_ if new transforms have come in while calling back or transforming data. More... | |
| ros::Time | next_failure_warning_ |
| ros::NodeHandle | nh_ |
| The node used to subscribe to the topic. More... | |
| uint32_t | queue_size_ |
| The maximum number of messages we queue up. More... | |
| uint64_t | successful_transform_count_ |
| std::vector< std::string > | target_frames_ |
| The frames we need to be able to transform to before a message is ready. More... | |
| std::string | target_frames_string_ |
| boost::mutex | target_frames_string_mutex_ |
| Transformer & | tf_ |
| The Transformer used to determine if transformation data is available. More... | |
| boost::signals2::connection | tf_connection_ |
| ros::Duration | time_tolerance_ |
| Provide additional tolerance on time for messages which are stamped but can have associated duration. More... | |
| uint64_t | transform_message_count_ |
| bool | warned_about_empty_frame_id_ |
| bool | warned_about_unresolved_name_ |
Additional Inherited Members |
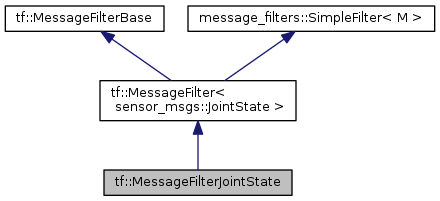
Detailed Description
Definition at line 47 of file effort_display.h.
Member Typedef Documentation
| typedef boost::function<void(const MConstPtr&, FilterFailureReason)> tf::MessageFilterJointState::FailureCallback |
Definition at line 53 of file effort_display.h.
| typedef boost::signals2::signal<void(const MConstPtr&, FilterFailureReason)> tf::MessageFilterJointState::FailureSignal |
Definition at line 57 of file effort_display.h.
|
private |
Definition at line 280 of file effort_display.h.
|
private |
Definition at line 49 of file effort_display.h.
| typedef boost::shared_ptr<M const> tf::MessageFilterJointState::MConstPtr |
Definition at line 51 of file effort_display.h.
| typedef ros::MessageEvent<M const> tf::MessageFilterJointState::MEvent |
Definition at line 52 of file effort_display.h.
Constructor & Destructor Documentation
|
inline |
Constructor.
- Parameters
-
tf The tf::Transformer this filter should use target_frame The frame this filter should attempt to transform to. To use multiple frames, pass an empty string here and use the setTargetFrames() function. queue_size The number of messages to queue up before throwing away old ones. 0 means infinite (dangerous). nh The NodeHandle to use for any necessary operations max_rate The maximum rate to check for newly transformable messages
Definition at line 72 of file effort_display.h.
|
inline |
Constructor.
- Parameters
-
f The filter to connect this filter's input to. Often will be a message_filters::Subscriber. tf The tf::Transformer this filter should use target_frame The frame this filter should attempt to transform to. To use multiple frames, pass an empty string here and use the setTargetFrames() function. queue_size The number of messages to queue up before throwing away old ones. 0 means infinite (dangerous). nh The NodeHandle to use for any necessary operations max_rate The maximum rate to check for newly transformable messages
Definition at line 95 of file effort_display.h.
|
inline |
Destructor.
Definition at line 122 of file effort_display.h.
Member Function Documentation
|
inline |
Definition at line 197 of file effort_display.h.
|
inline |
Manually add a message into this filter.
- Note
- If the message (or any other messages in the queue) are immediately transformable this will immediately call through to the output callback, possibly multiple times
Definition at line 232 of file effort_display.h.
|
inlineprivate |
Definition at line 426 of file effort_display.h.
|
inlinevirtual |
Clear any messages currently in the queue.
Implements tf::MessageFilterBase.
Definition at line 184 of file effort_display.h.
|
inline |
Connect this filter's input to another filter's output. If this filter is already connected, disconnects first.
Definition at line 113 of file effort_display.h.
|
inlineprivate |
Definition at line 454 of file effort_display.h.
|
inlinevirtual |
Reimplemented from tf::MessageFilter< sensor_msgs::JointState >.
Definition at line 254 of file effort_display.h.
|
inline |
Get the target frames as a string for debugging.
Definition at line 167 of file effort_display.h.
|
inlineprivate |
Callback that happens when we receive a message on the message topic.
Definition at line 414 of file effort_display.h.
|
inlineprivate |
Definition at line 261 of file effort_display.h.
|
inlineprivate |
Definition at line 399 of file effort_display.h.
|
inline |
Register a callback to be called when a message is about to be dropped.
- Parameters
-
callback The callback to call
Definition at line 243 of file effort_display.h.
| tf::MessageFilterJointState::ROS_STATIC_ASSERT | ( | ros::message_traits::HasHeader< M >::value | ) |
|
inlinevirtual |
Reimplemented from tf::MessageFilter< sensor_msgs::JointState >.
Definition at line 249 of file effort_display.h.
|
inlinevirtual |
Set the frame you need to be able to transform to before getting a message callback.
Implements tf::MessageFilterBase.
Definition at line 139 of file effort_display.h.
|
inlinevirtual |
Set the frames you need to be able to transform to before getting a message callback.
Implements tf::MessageFilterBase.
Definition at line 149 of file effort_display.h.
|
inlinevirtual |
Set the required tolerance for the notifier to return true.
Implements tf::MessageFilterBase.
Definition at line 176 of file effort_display.h.
|
inlineprivate |
Definition at line 460 of file effort_display.h.
|
inlineprivate |
- Todo:
- combine getLatestCommonTime call with the canTransform call
Definition at line 282 of file effort_display.h.
|
inlineprivate |
Definition at line 373 of file effort_display.h.
|
inlineprivate |
Definition at line 419 of file effort_display.h.
Member Data Documentation
|
private |
Definition at line 490 of file effort_display.h.
|
private |
Definition at line 487 of file effort_display.h.
|
private |
Definition at line 486 of file effort_display.h.
|
private |
Definition at line 506 of file effort_display.h.
|
private |
Definition at line 507 of file effort_display.h.
|
private |
Definition at line 489 of file effort_display.h.
|
private |
Definition at line 493 of file effort_display.h.
|
private |
Definition at line 492 of file effort_display.h.
|
private |
Definition at line 468 of file effort_display.h.
|
private |
Definition at line 469 of file effort_display.h.
|
private |
Definition at line 504 of file effort_display.h.
|
private |
The number of messages in the list. Used because messages_.size() has linear cost.
Definition at line 476 of file effort_display.h.
|
private |
The message list.
Definition at line 475 of file effort_display.h.
|
private |
The mutex used for locking message list operations.
Definition at line 477 of file effort_display.h.
|
private |
Used to skip waiting on new_data_ if new messages have come in while calling back.
Definition at line 479 of file effort_display.h.
|
private |
Used to skip waiting on new_data_ if new transforms have come in while calling back or transforming data.
Definition at line 480 of file effort_display.h.
|
private |
Definition at line 495 of file effort_display.h.
|
private |
The node used to subscribe to the topic.
Definition at line 467 of file effort_display.h.
|
private |
The maximum number of messages we queue up.
Definition at line 473 of file effort_display.h.
|
private |
Definition at line 485 of file effort_display.h.
|
private |
The frames we need to be able to transform to before a message is ready.
Definition at line 470 of file effort_display.h.
|
private |
Definition at line 471 of file effort_display.h.
|
private |
Definition at line 472 of file effort_display.h.
|
private |
The Transformer used to determine if transformation data is available.
Definition at line 466 of file effort_display.h.
|
private |
Definition at line 502 of file effort_display.h.
|
private |
Provide additional tolerance on time for messages which are stamped but can have associated duration.
Definition at line 497 of file effort_display.h.
|
private |
Definition at line 488 of file effort_display.h.
|
private |
Definition at line 483 of file effort_display.h.
|
private |
Definition at line 482 of file effort_display.h.
The documentation for this class was generated from the following file: