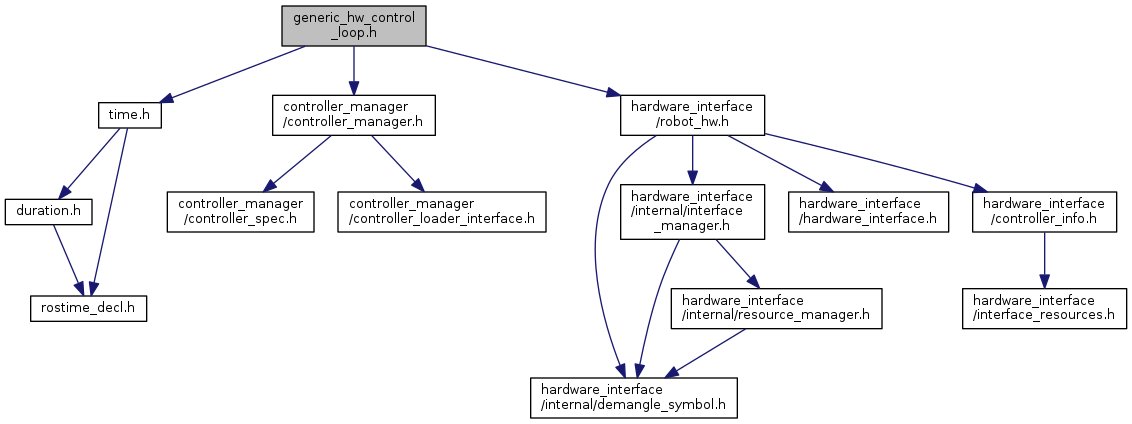
#include <time.h>#include <controller_manager/controller_manager.h>#include <hardware_interface/robot_hw.h>
Include dependency graph for generic_hw_control_loop.h:
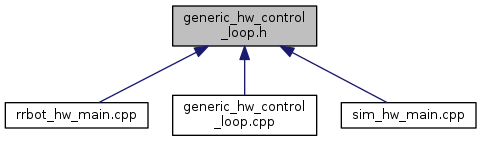
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | ros_control_boilerplate::GenericHWControlLoop |
| The control loop - repeatidly calls read() and write() to the hardware interface at a specified frequency We use MONOTONIC time to ensure robustness in the event of system time updates/change. See http://stackoverflow.com/questions/3523442/difference-between-clock-realtime-and-clock-monotonic. More... | |
Namespaces | |
| ros_control_boilerplate | |
Variables | |
| static const double | ros_control_boilerplate::BILLION = 1000000000.0 |