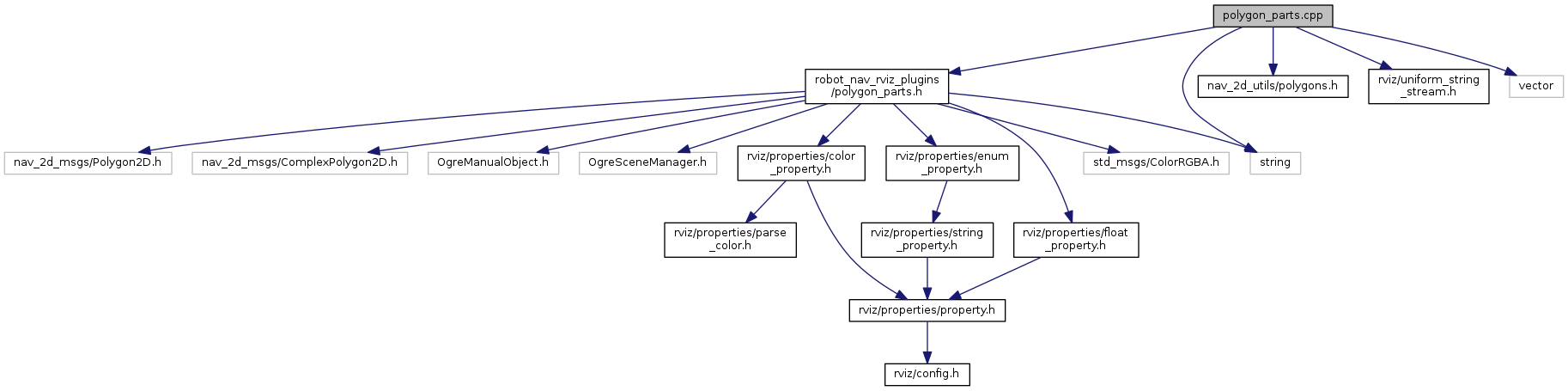
#include <robot_nav_rviz_plugins/polygon_parts.h>#include <nav_2d_utils/polygons.h>#include <rviz/uniform_string_stream.h>#include <string>#include <vector>
Include dependency graph for polygon_parts.cpp:
Go to the source code of this file.
Namespaces | |
| robot_nav_rviz_plugins | |
| Several reusable pieces for displaying polygons. | |
Functions | |
| std_msgs::ColorRGBA | robot_nav_rviz_plugins::getColor (rviz::ColorProperty *color_property, rviz::FloatProperty *alpha_property=nullptr) |
| Given a Color Property and an optional Float property, return a ROS Color message. More... | |