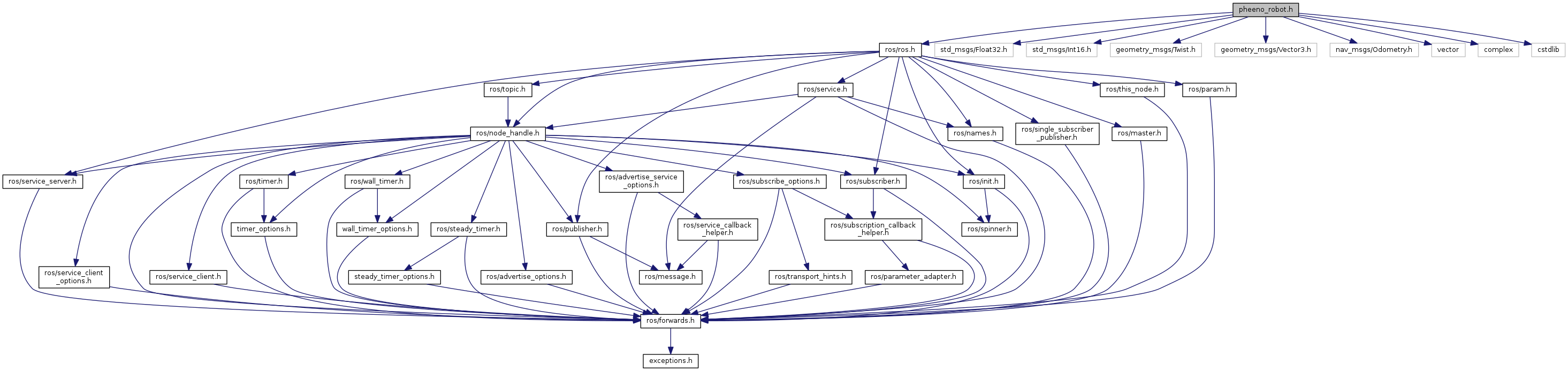
#include "ros/ros.h"#include "std_msgs/Float32.h"#include "std_msgs/Int16.h"#include "geometry_msgs/Twist.h"#include "geometry_msgs/Vector3.h"#include "nav_msgs/Odometry.h"#include <vector>#include <complex>#include <cstdlib>
Include dependency graph for pheeno_robot.h:
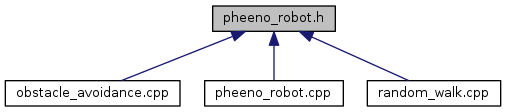
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | PheenoRobot |
Namespaces | |
| Pheeno | |
Enumerations | |
| enum | Pheeno::ENCODER { Pheeno::LL, Pheeno::LR, Pheeno::RL, Pheeno::RR } |
| enum | Pheeno::IR { Pheeno::CENTER, Pheeno::BACK, Pheeno::RIGHT, Pheeno::LEFT, Pheeno::CRIGHT, Pheeno::CLEFT } |