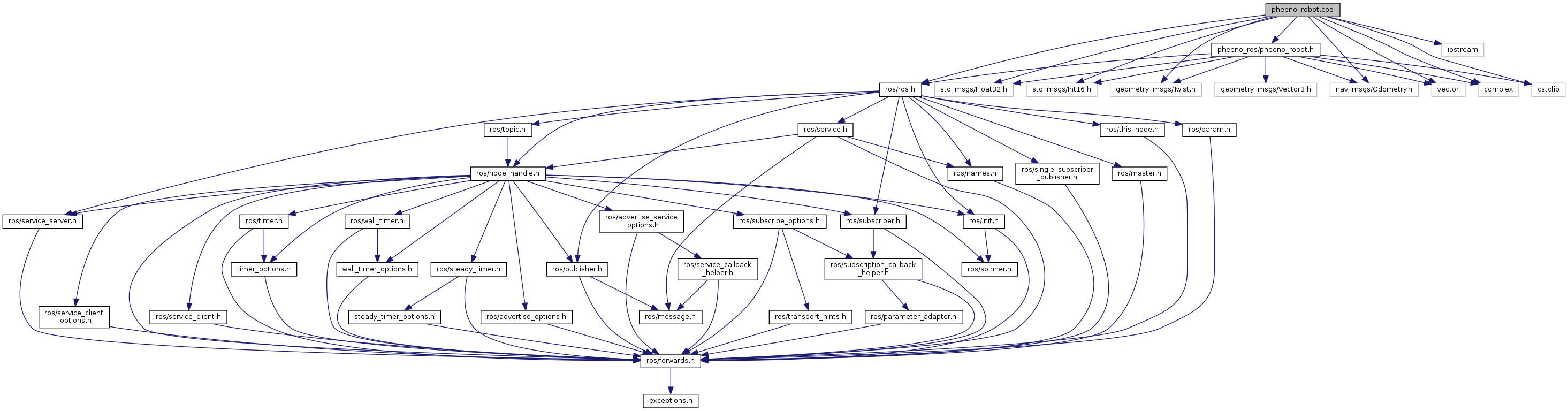
#include "ros/ros.h"#include "std_msgs/Float32.h"#include "std_msgs/Int16.h"#include "geometry_msgs/Twist.h"#include "nav_msgs/Odometry.h"#include "pheeno_ros/pheeno_robot.h"#include <vector>#include <complex>#include <cstdlib>#include <iostream>
Include dependency graph for pheeno_robot.cpp: