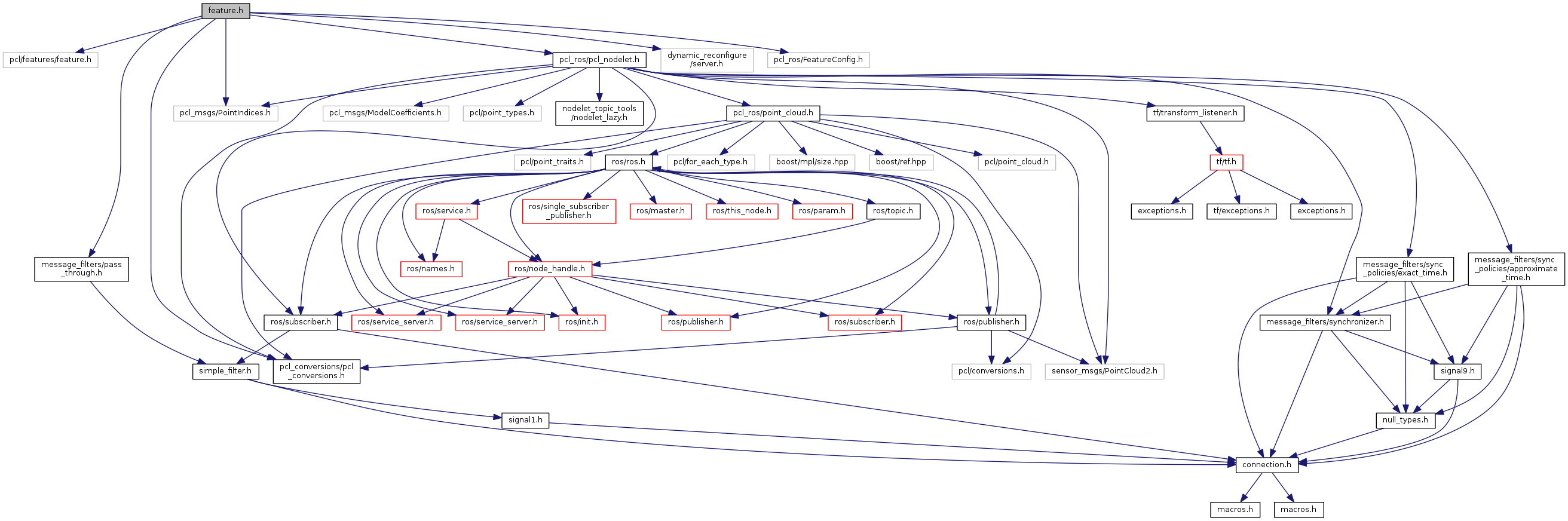
#include <pcl/features/feature.h>#include <pcl_msgs/PointIndices.h>#include "pcl_ros/pcl_nodelet.h"#include <message_filters/pass_through.h>#include <dynamic_reconfigure/server.h>#include "pcl_ros/FeatureConfig.h"#include <pcl_conversions/pcl_conversions.h>
Include dependency graph for feature.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | pcl_ros::Feature |
| Feature represents the base feature class. Some generic 3D operations that are applicable to all features are defined here as static methods. More... | |
| class | pcl_ros::FeatureFromNormals |
Namespaces | |
| pcl_ros | |