This is a simple filter which reduces a trajectory to N points or less. More...
#include <n_point_filter.h>
Public Member Functions | |
| virtual bool | configure () |
| FilterBase method for the sub class to configure the filter This function must be implemented in the derived class. More... | |
| NPointFilter () | |
| Default constructor. More... | |
| bool | update (const T &trajectory_in, T &trajectory_out) |
| Reduces a trajectory to N points or less. The resulting trajectory contains only point within the original trajectory (no interpolation is done between points). More... | |
| ~NPointFilter () | |
| Default destructor. More... | |
 Public Member Functions inherited from industrial_trajectory_filters::FilterBase< T > Public Member Functions inherited from industrial_trajectory_filters::FilterBase< T > | |
| FilterBase () | |
| Default constructor. More... | |
| const std::string & | getName () |
| Original FitlerBase Method. More... | |
| std::string | getType () |
| Original FilterBase method, return filter type. More... | |
| virtual | ~FilterBase () |
| Public Member Functions inherited from planning_request_adapter::PlanningRequestAdapter | |
| bool | adaptAndPlan (const planning_interface::PlannerManagerPtr &planner, const planning_scene::PlanningSceneConstPtr &planning_scene, const planning_interface::MotionPlanRequest &req, planning_interface::MotionPlanResponse &res) const |
| bool | adaptAndPlan (const planning_interface::PlannerManagerPtr &planner, const planning_scene::PlanningSceneConstPtr &planning_scene, const planning_interface::MotionPlanRequest &req, planning_interface::MotionPlanResponse &res, std::vector< std::size_t > &added_path_index) const |
| PlanningRequestAdapter () | |
| virtual | ~PlanningRequestAdapter () |
Private Attributes | |
| int | n_points_ |
| number of points to reduce trajectory to More... | |
Additional Inherited Members | |
| Public Types inherited from planning_request_adapter::PlanningRequestAdapter | |
| typedef boost::function< bool(const planning_scene::PlanningSceneConstPtr &planning_scene, const planning_interface::MotionPlanRequest &req, planning_interface::MotionPlanResponse &res)> | PlannerFn |
| Protected Member Functions inherited from industrial_trajectory_filters::FilterBase< T > | |
| virtual bool | adaptAndPlan (const PlannerFn &planner, const planning_scene::PlanningSceneConstPtr &planning_scene, const planning_interface::MotionPlanRequest &req, planning_interface::MotionPlanResponse &res, std::vector< std::size_t > &added_path_index) const |
| Moveit Planning Request Adapter method. This basic implementation of the adaptAndPlan method calls the planner and then maps the trajectory data from the MotionPlanResponse object into the MessageAdapter mapping structure. The MessageAdapter object is then passed to the "update" method that resembles that from the old FilterBase interface class. The filtered trajectory is finally saved in the MotionPlanResponse object. More... | |
| virtual std::string | getDescription () const |
| Return description string. More... | |
| Protected Attributes inherited from industrial_trajectory_filters::FilterBase< T > | |
| bool | configured_ |
| Holds filter configuration state. More... | |
| std::string | filter_name_ |
| filter name More... | |
| std::string | filter_type_ |
| ros::NodeHandle | nh_ |
| Internal node handle (used for parameter lookup) More... | |
Detailed Description
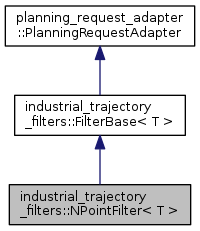
template<typename T>
class industrial_trajectory_filters::NPointFilter< T >
This is a simple filter which reduces a trajectory to N points or less.
Definition at line 45 of file n_point_filter.h.
Constructor & Destructor Documentation
| NPointFilter::NPointFilter | ( | ) |
Default constructor.
Definition at line 41 of file n_point_filter.cpp.
| NPointFilter::~NPointFilter | ( | ) |
Default destructor.
Definition at line 51 of file n_point_filter.cpp.
Member Function Documentation
|
virtual |
FilterBase method for the sub class to configure the filter This function must be implemented in the derived class.
- Returns
- true if successful, otherwise false.
Implements industrial_trajectory_filters::FilterBase< T >.
Definition at line 56 of file n_point_filter.cpp.
|
virtual |
Reduces a trajectory to N points or less. The resulting trajectory contains only point within the original trajectory (no interpolation is done between points).
- Parameters
-
trajectory_in input trajectory trajectory_out filtered trajectory (N points or less
- Returns
- true if successful
Implements industrial_trajectory_filters::FilterBase< T >.
Definition at line 74 of file n_point_filter.cpp.
Member Data Documentation
|
private |
number of points to reduce trajectory to
Definition at line 78 of file n_point_filter.h.
The documentation for this class was generated from the following files: