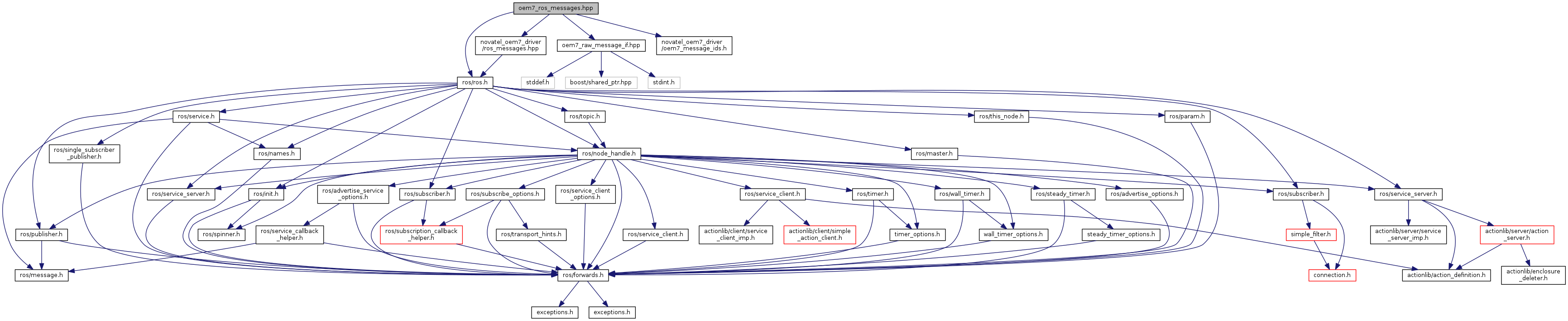
#include <ros/ros.h>#include "oem7_raw_message_if.hpp"#include "novatel_oem7_driver/ros_messages.hpp"#include "novatel_oem7_driver/oem7_message_ids.h"
Include dependency graph for oem7_ros_messages.hpp:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Namespaces | |
| novatel_oem7_driver | |
Functions | |
| void | novatel_oem7_driver::GetDOPFromPSRDOP2 (const Oem7RawMessageIf::ConstPtr &msg, uint32_t system_to_use, double &gdop, double &pdop, double &hdop, double &vdop, double &tdop) |
| template<class T > | |
| void | novatel_oem7_driver::MakeROSMessage (const Oem7RawMessageIf::ConstPtr &msg, boost::shared_ptr< T > &rosmsg) |