#include <Eigen/Dense>#include "opw_kinematics/opw_parameters.h"#include "opw_kinematics/opw_kinematics_impl.h"
Include dependency graph for opw_kinematics.h:
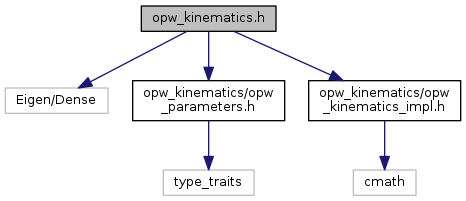
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Namespaces | |
| opw_kinematics | |
Typedefs | |
| template<typename T > | |
| using | opw_kinematics::Transform = Eigen::Transform< T, 3, Eigen::Isometry > |
Functions | |
| template<typename T > | |
| Transform< T > | opw_kinematics::forward (const Parameters< T > &p, const T *qs) noexcept |
| Computes the tool pose of the robot described by when said robot has the joint positions given by qs, a 6 element array of type T. More... | |
| template<typename T > | |
| void | opw_kinematics::inverse (const Parameters< T > ¶ms, const Transform< T > &pose, T *out) noexcept |
| Computes up to 8 kinematically unique joint solutions that put the tool flange of the robot described by params at the pose given by pose. Results are stored in out, a 6x8 array of T. See out's description for more details. More... | |