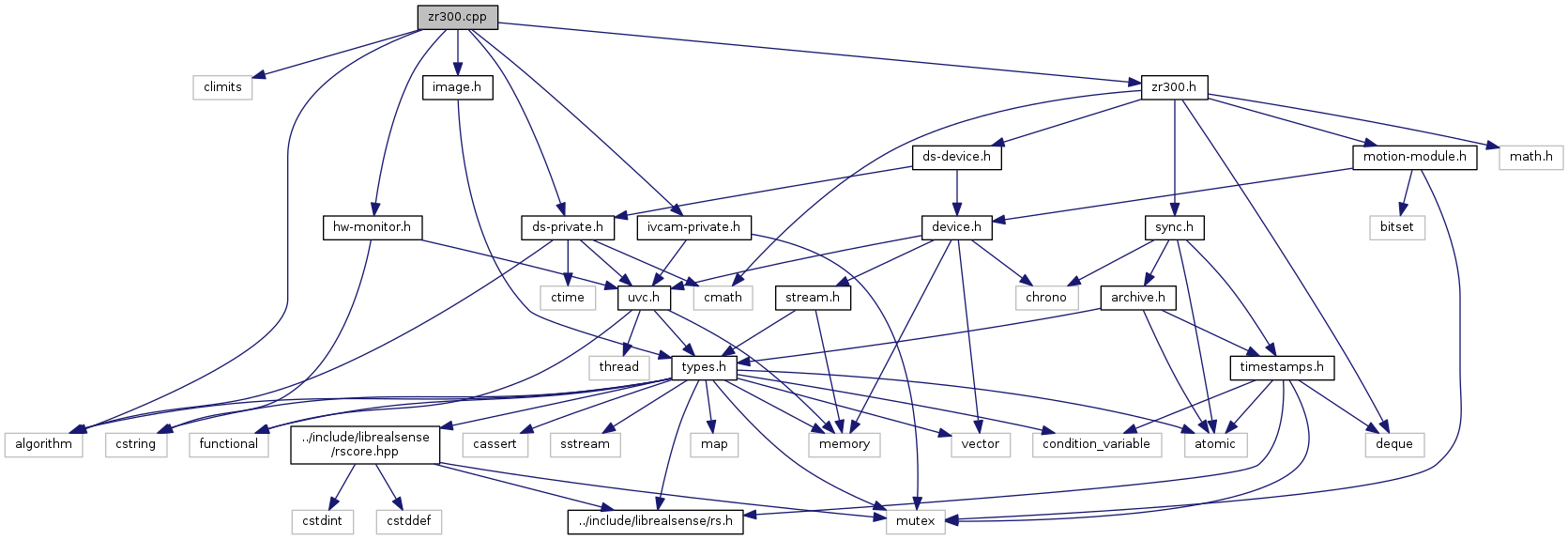
#include <climits>#include <algorithm>#include "image.h"#include "ds-private.h"#include "zr300.h"#include "ivcam-private.h"#include "hw-monitor.h"
Include dependency graph for zr300.cpp:
Go to the source code of this file.
Namespaces | |
| rsimpl | |
Functions | |
| bool | rsimpl::is_fisheye_uvc_control (rs_option option) |
| bool | rsimpl::is_fisheye_xu_control (rs_option option) |
| std::shared_ptr< rs_device > | rsimpl::make_zr300_device (std::shared_ptr< uvc::device > device) |
| calibration | rsimpl::read_calibration (uvc::device &device, std::timed_mutex &mutex) |
| motion_module_calibration | rsimpl::read_fisheye_intrinsic (uvc::device &device, std::timed_mutex &mutex) |
| serial_number | rsimpl::read_serial_number (uvc::device &device, std::timed_mutex &mutex) |
| template<typename T > | |
| T | rsimpl::sqr (const T &x) |