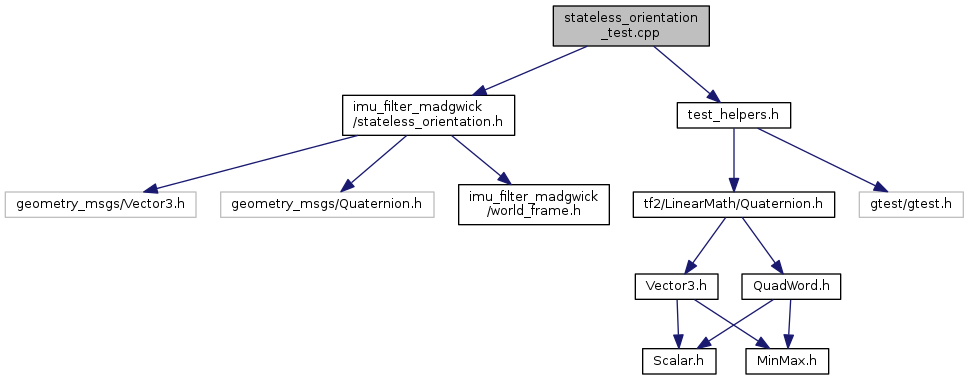
Include dependency graph for stateless_orientation_test.cpp:
Go to the source code of this file.
Macros | |
| #define | TEST_STATELESS_ENU(in_am, exp_result) |
| #define | TEST_STATELESS_NED(in_am, exp_result) |
| #define | TEST_STATELESS_NWU(in_am, exp_result) |
Functions | |
| template<WorldFrame::WorldFrame FRAME> | |
| bool | computeOrientation (float Ax, float Ay, float Az, float Mx, float My, float Mz, double &q0, double &q1, double &q2, double &q3) |
| template<WorldFrame::WorldFrame FRAME> | |
| bool | computeOrientation (float Ax, float Ay, float Az, double &q0, double &q1, double &q2, double &q3) |
| TEST (StatelessOrientationTest, Check_NoAccel) | |
| TEST (StatelessOrientationTest, Check_NoMag) | |
Macro Definition Documentation
| #define TEST_STATELESS_ENU | ( | in_am, | |
| exp_result | |||
| ) |
Value:
TEST(StatelessOrientationTest, Stationary_ENU_ ## in_am){ \
double q0, q1, q2, q3; \
ASSERT_TRUE(computeOrientation<WorldFrame::ENU>(in_am, q0, q1, q2, q3)); \
ASSERT_IS_NORMALIZED(q0, q1, q2, q3); \
ASSERT_QUAT_EQUAL(q0, q1, q2, q3, exp_result); } \
TEST(StatelessOrientationTest, Stationary_ENU_NM_ ## in_am){ \
double q0, q1, q2, q3; \
ASSERT_TRUE(computeOrientation<WorldFrame::ENU>(ACCEL_ONLY(in_am), q0, q1, q2, q3)); \
ASSERT_IS_NORMALIZED(q0, q1, q2, q3); \
ASSERT_QUAT_EQUAL_EX_Z(q0, q1, q2, q3, exp_result); }
Definition at line 46 of file stateless_orientation_test.cpp.
| #define TEST_STATELESS_NED | ( | in_am, | |
| exp_result | |||
| ) |
Value:
TEST(StatelessOrientationTest, Stationary_NED_ ## in_am){ \
double q0, q1, q2, q3; \
ASSERT_TRUE(computeOrientation<WorldFrame::NED>(in_am, q0, q1, q2, q3)); \
ASSERT_IS_NORMALIZED(q0, q1, q2, q3); \
ASSERT_QUAT_EQUAL(q0, q1, q2, q3, exp_result); } \
TEST(StatelessOrientationTest, Stationary_NED_NM_ ## in_am){ \
double q0, q1, q2, q3; \
ASSERT_TRUE(computeOrientation<WorldFrame::NED>(ACCEL_ONLY(in_am), q0, q1, q2, q3)); \
ASSERT_IS_NORMALIZED(q0, q1, q2, q3); \
ASSERT_QUAT_EQUAL_EX_Z(q0, q1, q2, q3, exp_result); }
Definition at line 58 of file stateless_orientation_test.cpp.
| #define TEST_STATELESS_NWU | ( | in_am, | |
| exp_result | |||
| ) |
Value:
TEST(StatelessOrientationTest, Stationary_NWU_ ## in_am){ \
double q0, q1, q2, q3; \
ASSERT_TRUE(computeOrientation<WorldFrame::NWU>(in_am, q0, q1, q2, q3)); \
ASSERT_IS_NORMALIZED(q0, q1, q2, q3); \
ASSERT_QUAT_EQUAL(q0, q1, q2, q3, exp_result); } \
TEST(StatelessOrientationTest, Stationary_NWU_NM_ ## in_am){ \
double q0, q1, q2, q3; \
ASSERT_TRUE(computeOrientation<WorldFrame::NWU>(ACCEL_ONLY(in_am), q0, q1, q2, q3)); \
ASSERT_IS_NORMALIZED(q0, q1, q2, q3); \
ASSERT_QUAT_EQUAL_EX_Z(q0, q1, q2, q3, exp_result); }
Definition at line 70 of file stateless_orientation_test.cpp.
Function Documentation
template<WorldFrame::WorldFrame FRAME>
| bool computeOrientation | ( | float | Ax, |
| float | Ay, | ||
| float | Az, | ||
| float | Mx, | ||
| float | My, | ||
| float | Mz, | ||
| double & | q0, | ||
| double & | q1, | ||
| double & | q2, | ||
| double & | q3 | ||
| ) |
Definition at line 6 of file stateless_orientation_test.cpp.
template<WorldFrame::WorldFrame FRAME>
| bool computeOrientation | ( | float | Ax, |
| float | Ay, | ||
| float | Az, | ||
| double & | q0, | ||
| double & | q1, | ||
| double & | q2, | ||
| double & | q3 | ||
| ) |
Definition at line 27 of file stateless_orientation_test.cpp.
| TEST | ( | StatelessOrientationTest | , |
| Check_NoAccel | |||
| ) |
Definition at line 101 of file stateless_orientation_test.cpp.
| TEST | ( | StatelessOrientationTest | , |
| Check_NoMag | |||
| ) |
Definition at line 109 of file stateless_orientation_test.cpp.