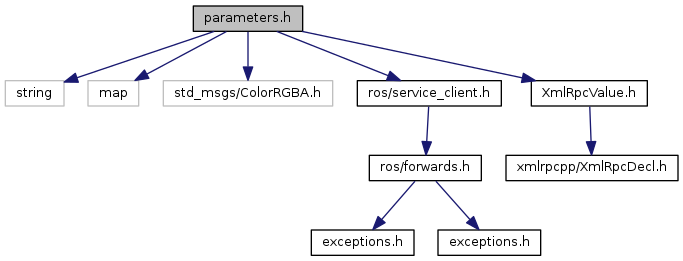
#include <string>#include <map>#include <std_msgs/ColorRGBA.h>#include <ros/service_client.h>#include <XmlRpcValue.h>
Include dependency graph for parameters.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Namespaces | |
| hector_object_tracker | |
| hector_object_tracker::Parameters | |
Typedefs | |
| typedef std::vector< ServiceClientWithProperties > | hector_object_tracker::ServiceClientsWithProperties |
| typedef std::pair< ros::ServiceClientPtr, XmlRpc::XmlRpcValue > | hector_object_tracker::ServiceClientWithProperties |
Functions | |
| void | hector_object_tracker::Parameters::load (const std::string &class_id) |
| template<typename T > | |
| static T & | hector_object_tracker::parameter (std::map< std::string, T > &p, const std::string &class_id=std::string()) |