#include <hebiros_gazebo_controller.h>
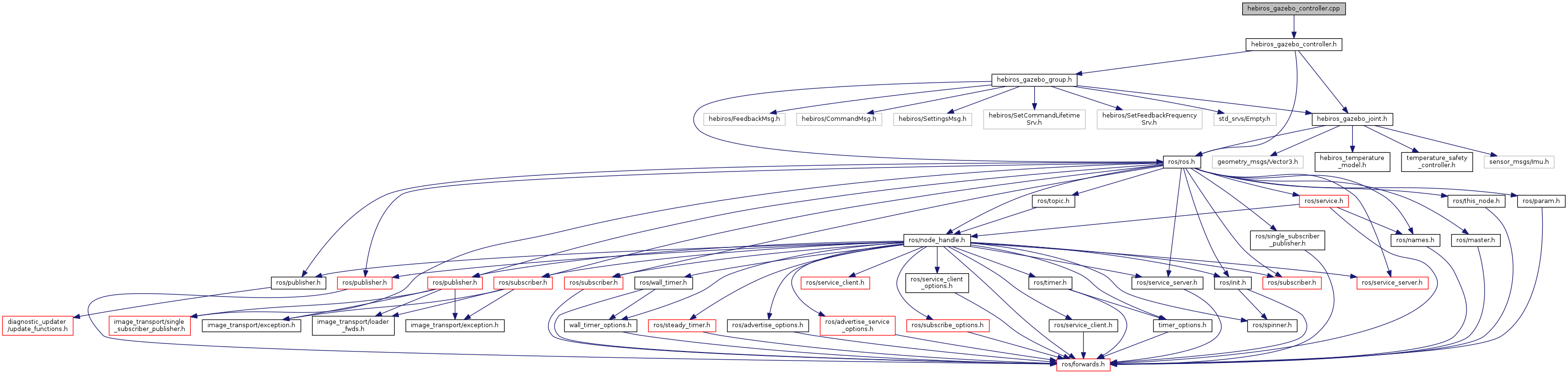
Include dependency graph for hebiros_gazebo_controller.cpp:
Go to the source code of this file.
Namespaces | |
| controller | |
Variables | |
| static constexpr control_strategies | controller::DEFAULT_CONTROL_STRATEGY = control_strategies::CONTROL_STRATEGY_3 |
| static constexpr double | controller::DEFAULT_EFFORT_KD = 0.001 |
| static constexpr double | controller::DEFAULT_EFFORT_KI = 0.0 |
| static constexpr double | controller::DEFAULT_EFFORT_KP = 0.25 |
| static constexpr double | controller::DEFAULT_GEAR_RATIO = 272.22 |
| static constexpr double | controller::DEFAULT_POSITION_KD = 0.0 |
| static constexpr double | controller::DEFAULT_POSITION_KI = 0.0 |
| static constexpr double | controller::DEFAULT_POSITION_KP = 0.5 |
| static constexpr double | controller::DEFAULT_VELOCITY_KD = 0.0 |
| static constexpr double | controller::DEFAULT_VELOCITY_KI = 0.0 |
| static constexpr double | controller::DEFAULT_VELOCITY_KP = 0.05 |
| static constexpr double | controller::GEAR_RATIO_X5_1 = 272.22 |
| static constexpr double | controller::GEAR_RATIO_X5_4 = 762.22 |
| static constexpr double | controller::GEAR_RATIO_X5_9 = 1742.22 |
| static constexpr double | controller::GEAR_RATIO_X8_16 = 1462.222 |
| static constexpr double | controller::GEAR_RATIO_X8_3 = 272.22 |
| static constexpr double | controller::GEAR_RATIO_X8_9 = 762.22 |
| static std::map< std::string, double > | controller::gear_ratios |
| static constexpr double | controller::LOW_PASS_ALPHA = 0.1 |
| static constexpr double | controller::MAX_PWM = 1.0 |
| static constexpr double | controller::MIN_PWM = -1.0 |