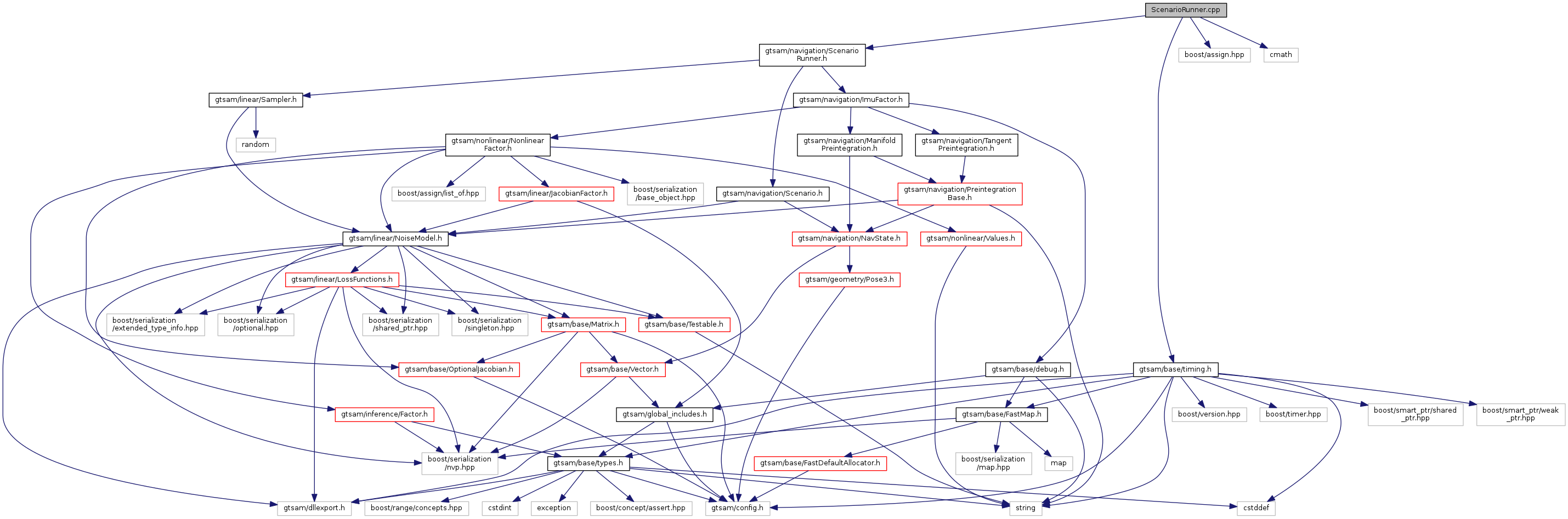
#include <gtsam/navigation/ScenarioRunner.h>#include <gtsam/base/timing.h>#include <boost/assign.hpp>#include <cmath>
Include dependency graph for ScenarioRunner.cpp:
Go to the source code of this file.
Namespaces | |
| gtsam | |
| traits | |
Variables | |
| static double | gtsam::intNoiseVar = 0.0000001 |
| static const Matrix3 | gtsam::kIntegrationErrorCovariance = intNoiseVar * I_3x3 |