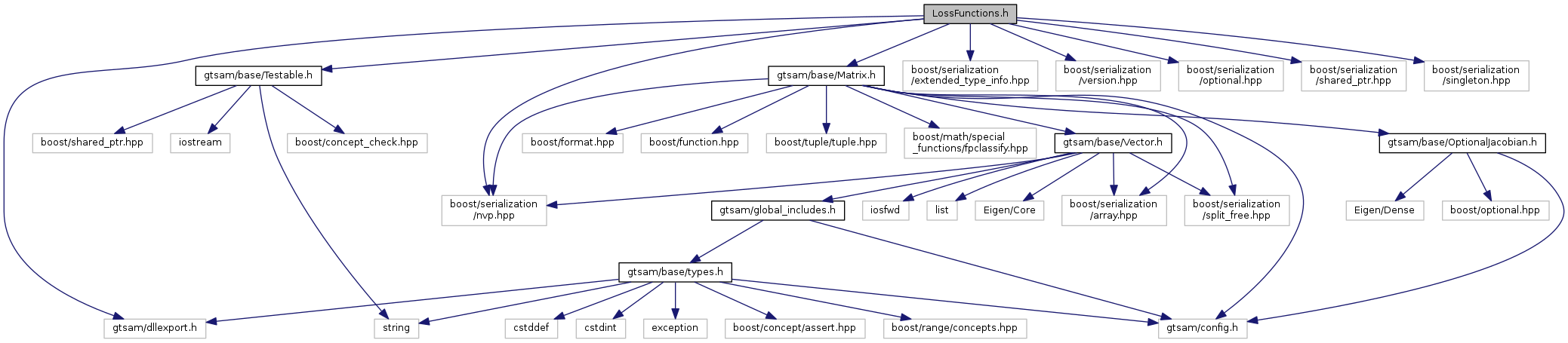
#include <gtsam/base/Matrix.h>#include <gtsam/base/Testable.h>#include <gtsam/dllexport.h>#include <boost/serialization/extended_type_info.hpp>#include <boost/serialization/nvp.hpp>#include <boost/serialization/version.hpp>#include <boost/serialization/optional.hpp>#include <boost/serialization/shared_ptr.hpp>#include <boost/serialization/singleton.hpp>
Include dependency graph for LossFunctions.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | gtsam::noiseModel::mEstimator::Base |
| class | gtsam::noiseModel::mEstimator::Cauchy |
| class | gtsam::noiseModel::mEstimator::DCS |
| class | gtsam::noiseModel::mEstimator::Fair |
| Fair implements the "Fair" robust error model (Zhang97ivc) More... | |
| class | gtsam::noiseModel::mEstimator::GemanMcClure |
| class | gtsam::noiseModel::mEstimator::Huber |
| Huber implements the "Huber" robust error model (Zhang97ivc) More... | |
| class | gtsam::noiseModel::mEstimator::L2WithDeadZone |
| class | gtsam::noiseModel::mEstimator::Null |
| Null class should behave as Gaussian. More... | |
| class | gtsam::noiseModel::mEstimator::Tukey |
| Tukey implements the "Tukey" robust error model (Zhang97ivc) More... | |
| class | gtsam::noiseModel::mEstimator::Welsch |
| Welsch implements the "Welsch" robust error model (Zhang97ivc) More... | |
Namespaces | |
| gtsam | |
| traits | |
| gtsam::noiseModel | |
| All noise models live in the noiseModel namespace. | |
| gtsam::noiseModel::mEstimator | |