Inverse Depth Camera based on Civera09tro, Montiel06rss. Landmarks are initialized from the first camera observation with (x,y,z,theta,phi,inv_depth), where x,y,z are the coordinates of the camera. More...
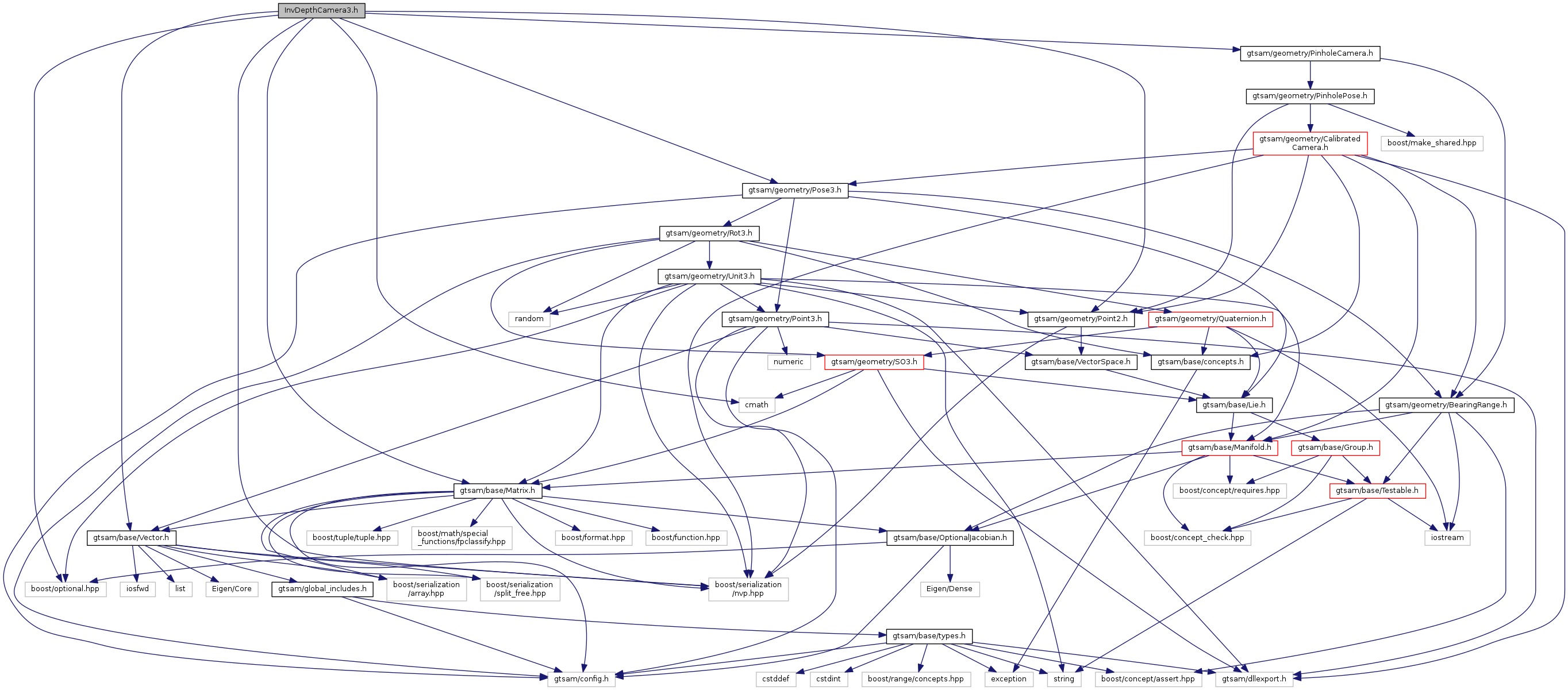
#include <cmath>#include <boost/optional.hpp>#include <boost/serialization/nvp.hpp>#include <gtsam/base/Vector.h>#include <gtsam/base/Matrix.h>#include <gtsam/geometry/Point2.h>#include <gtsam/geometry/Pose3.h>#include <gtsam/geometry/PinholeCamera.h>
Include dependency graph for InvDepthCamera3.h:
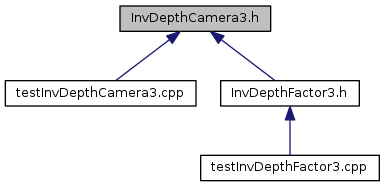
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | gtsam::InvDepthCamera3< CALIBRATION > |
Namespaces | |
| gtsam | |
| traits | |
Detailed Description
Inverse Depth Camera based on Civera09tro, Montiel06rss. Landmarks are initialized from the first camera observation with (x,y,z,theta,phi,inv_depth), where x,y,z are the coordinates of the camera.
- Date
- Apr 14, 2012
Definition in file InvDepthCamera3.h.