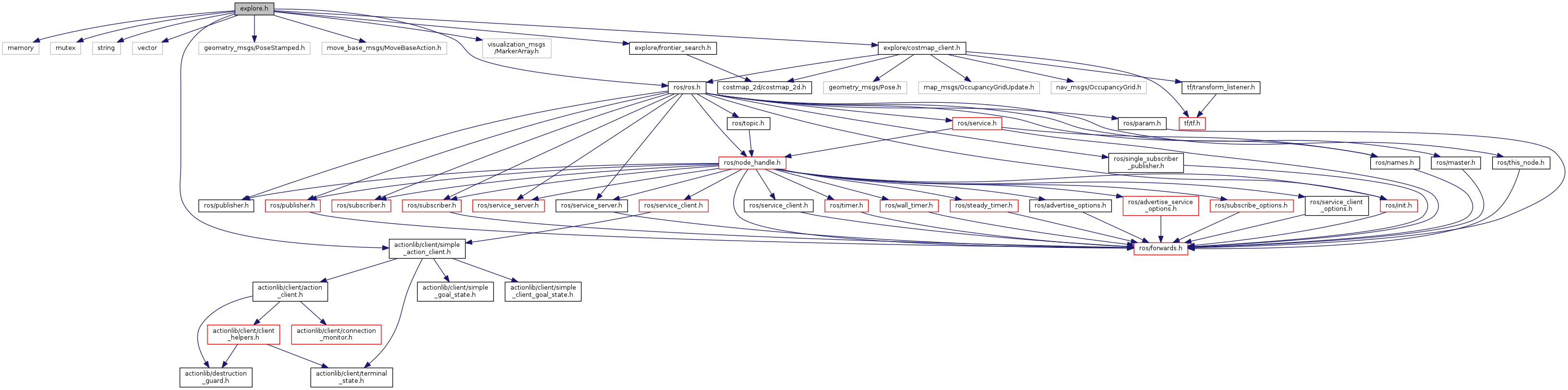
#include <memory>#include <mutex>#include <string>#include <vector>#include <actionlib/client/simple_action_client.h>#include <geometry_msgs/PoseStamped.h>#include <move_base_msgs/MoveBaseAction.h>#include <ros/ros.h>#include <visualization_msgs/MarkerArray.h>#include <explore/costmap_client.h>#include <explore/frontier_search.h>
Include dependency graph for explore.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | explore::Explore |
| A class adhering to the robot_actions::Action interface that moves the robot base to explore its environment. More... | |
Namespaces | |
| explore | |