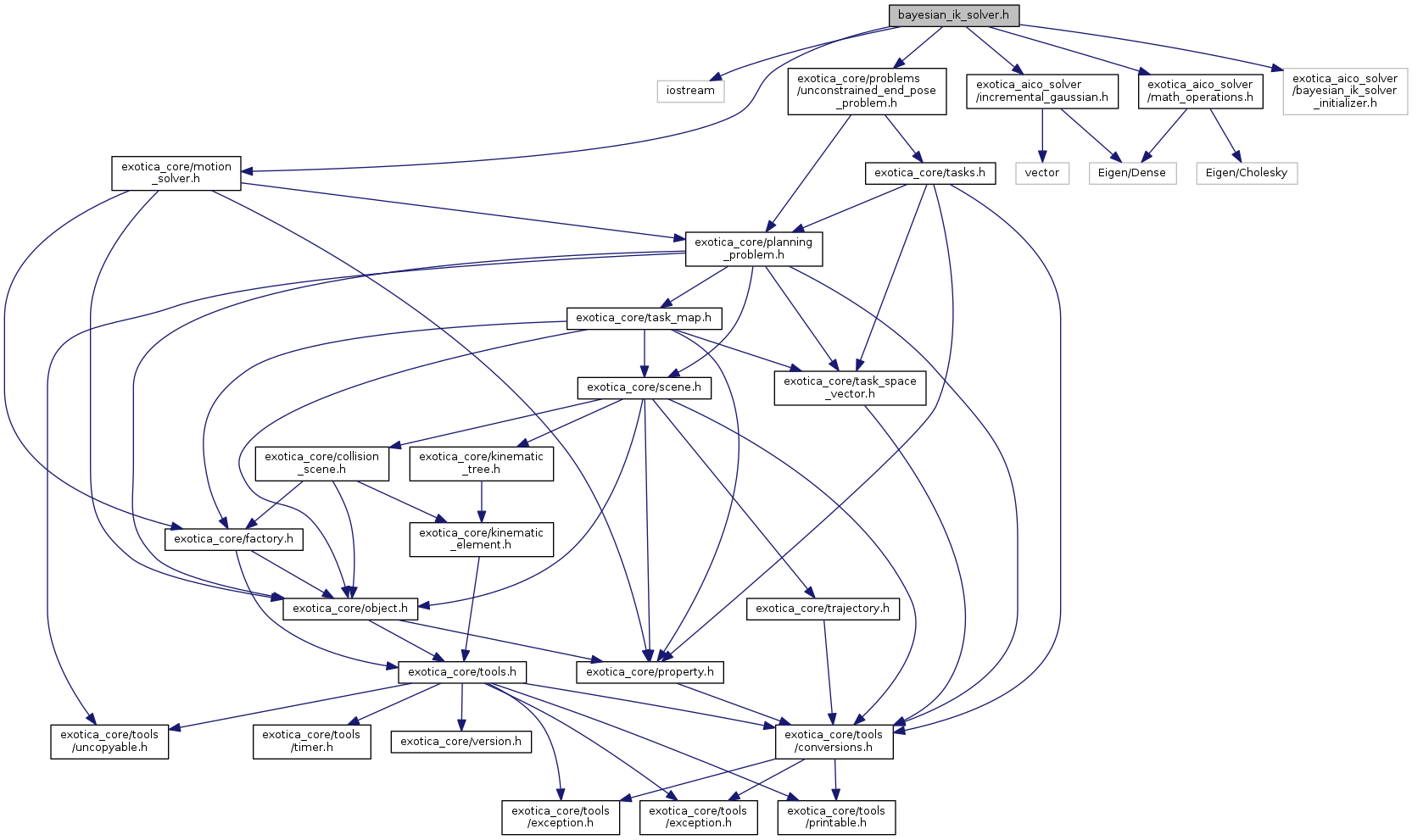
#include <iostream>#include <exotica_core/motion_solver.h>#include <exotica_core/problems/unconstrained_end_pose_problem.h>#include <exotica_aico_solver/incremental_gaussian.h>#include <exotica_aico_solver/math_operations.h>#include <exotica_aico_solver/bayesian_ik_solver_initializer.h>
Include dependency graph for bayesian_ik_solver.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | exotica::BayesianIKSolver |
| Solves motion planning problem using Approximate Inference Control method. More... | |
Namespaces | |
| exotica | |