#include "pose_sampling_helpers.h"
Include dependency graph for pose_sampling_helpers.cpp:
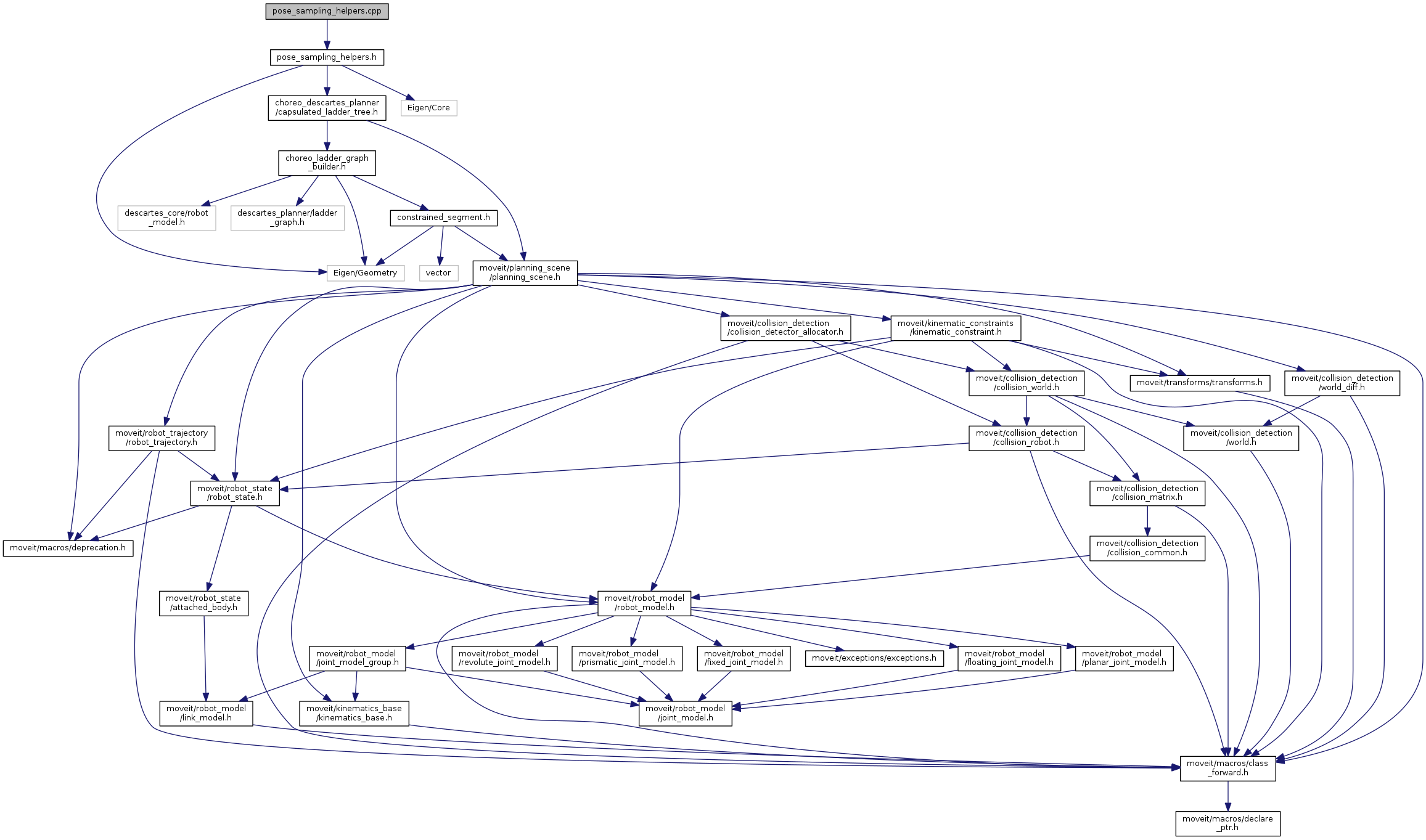
Go to the source code of this file.
Namespaces | |
| descartes_planner | |
Functions | |
| std::vector< Eigen::Vector3d > | descartes_planner::discretizePositions (const Eigen::Vector3d &start, const Eigen::Vector3d &stop, const double ds) |
| std::vector< Eigen::Affine3d > | descartes_planner::generateSample (const descartes_planner::CapRung &cap_rung, descartes_planner::CapVert &cap_vert) |
| std::vector< std::vector< Eigen::Affine3d > > | descartes_planner::generateSamplePickNPlace (const descartes_planner::CapRung &cap_rung, descartes_planner::CapVert &cap_vert) |
| Eigen::Affine3d | descartes_planner::makePose (const Eigen::Vector3d &position, const Eigen::Matrix3d &orientation, const double z_axis_angle) |
| Eigen::Affine3d | descartes_planner::makePose (const Eigen::Vector3d &position, const Eigen::Matrix3d &orientation) |
| double | descartes_planner::randomSampleDouble (double lower, double upper) |
| int | descartes_planner::randomSampleInt (int lower, int upper) |