#include "constrained_segment.h"#include <descartes_planner/ladder_graph.h>#include <descartes_core/robot_model.h>#include <Eigen/Geometry>
Include dependency graph for choreo_ladder_graph_builder.h:

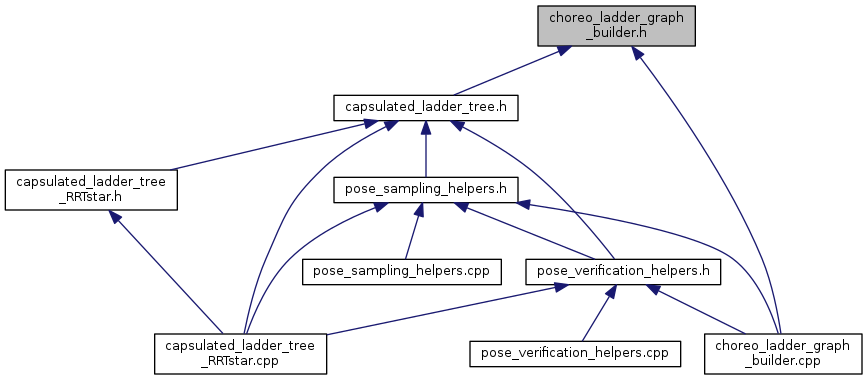
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| descartes_planner | |
Functions | |
| void | descartes_planner::appendInTime (LadderGraph ¤t, const LadderGraph &next) |
| LadderGraph | descartes_planner::sampleConstrainedPaths (const descartes_core::RobotModel &model, ConstrainedSegment &segment) |
| LadderGraph | descartes_planner::sampleSingleConfig (const descartes_core::RobotModel &model, const std::vector< Eigen::Vector3d > &origins, const Eigen::Matrix3d &orientation, const double dt) |
| LadderGraph | descartes_planner::sampleSingleConfig (const descartes_core::RobotModel &model, const std::vector< Eigen::Vector3d > &origins, const double dt, const Eigen::Matrix3d &orientation, const double z_axis_angle) |