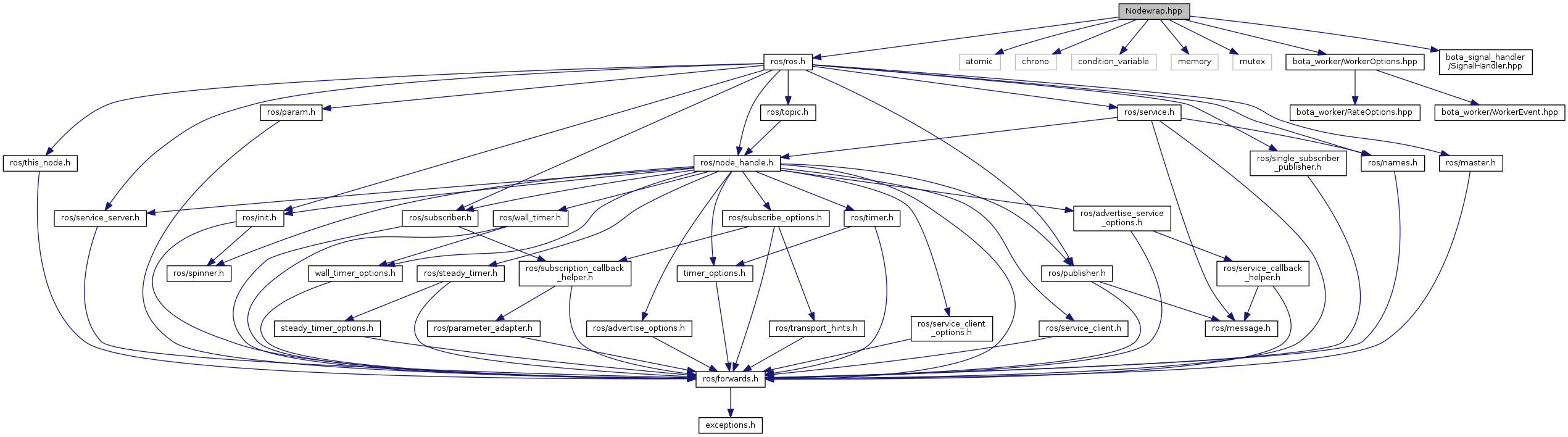
#include <ros/ros.h>#include <atomic>#include <chrono>#include <condition_variable>#include <memory>#include <mutex>#include "bota_worker/WorkerOptions.hpp"#include "bota_signal_handler/SignalHandler.hpp"
Include dependency graph for Nodewrap.hpp:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | bota_node::Nodewrap< NodeImpl > |
Namespaces | |
| bota_node | |
Detailed Description
- Date
- July, 2016
Definition in file Nodewrap.hpp.