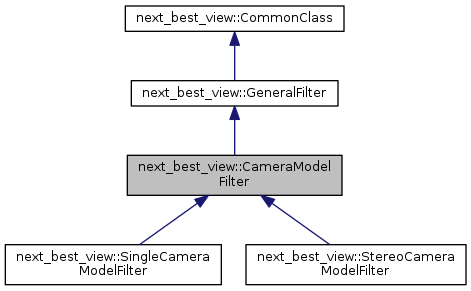
CameraModelFilter class was built to generalize the filtering for different camera models. More...
#include <CameraModelFilter.hpp>
Public Member Functions | |
| CameraModelFilter () | |
| constructs a new camera model filter. More... | |
| double | getFarClippingPlane () |
| double | getHorizontalFOV () |
| double | getNearClippingPlane () |
| SimpleQuaternion | getOrientation () |
| SimpleVector3 | getPivotPointPosition () |
| virtual float | getRecognizerCosts (std::string objectType) |
| double | getVerticalFOV () |
| virtual viz::MarkerArrayPtr | getVisualizationMarkerArray (uint32_t &sequence, double lifetime=30.0)=0 |
| returns a array of markers containing the visualization of the camera frustum. More... | |
| bool | haveParametersChanged () |
| void | setFarClippingPlane (double fcp) |
| sets the far clipping plane. fcp the far clipping distance More... | |
| void | setHorizontalFOV (double fovDegrees) |
| sets the horizontal field of view. More... | |
| void | setNearClippingPlane (double ncp) |
| sets the near clipping plane. More... | |
| void | setOrientation (const SimpleQuaternion &orientation) |
| sets the orientation of the pivot point More... | |
| void | setParametersChanged (bool value) |
| void | setPivotPointPose (const SimpleVector3 &position, const SimpleQuaternion &orientation) |
| sets the pose of the pivot point. More... | |
| void | setPivotPointPosition (const SimpleVector3 &position) |
| sets the position of the pivot point. More... | |
| virtual void | setRecognizerCosts (float recognizerCosts, std::string objectType) |
| void | setVerticalFOV (double fovDegrees) |
| sets the vertical field of view. More... | |
| virtual | ~CameraModelFilter ()=0 |
| destructs the camera model filter. More... | |
 Public Member Functions inherited from next_best_view::GeneralFilter Public Member Functions inherited from next_best_view::GeneralFilter | |
| virtual void | doFiltering (IndicesPtr &indicesPtr)=0 |
| Does the filtering on the indices. More... | |
| void | filter (IndicesPtr &indicesPtr) |
| Applies the filter on the indices. More... | |
| GeneralFilter () | |
| void | setPostFilter (GeneralFilterPtr &filterPtr) |
| Adding a post filter to this filter. More... | |
| void | setPreFilter (GeneralFilterPtr &filterPtr) |
| Adding a pre filter to this filter. More... | |
| Public Member Functions inherited from next_best_view::CommonClass | |
| CommonClass () | |
| constructor More... | |
| virtual IndicesPtr & | getIndices () |
| virtual ObjectPointCloudPtr & | getInputCloud () |
| virtual void | setIndices (const IndicesPtr &indicesPtr) |
| setting the shared pointer to the active indices of the point cloud. More... | |
| virtual void | setInputCloud (const ObjectPointCloudPtr &pointCloudPtr) |
| setting the input cloud. More... | |
| virtual | ~CommonClass ()=0 |
| pure virtual deconstructor. More... | |
Static Protected Member Functions | |
| static SimpleMatrix4 | getCameraPoseMatrix (const SimpleVector3 &position, const SimpleQuaternion &orientation) |
| convenience function to get a camera pose matrix. More... | |
Private Attributes | |
| double | mFcp |
| the far clipping distance. More... | |
| double | mFOVX |
| the horizontal field of view. More... | |
| double | mFOVY |
| the vertical field of view. More... | |
| double | mNcp |
| the near clipping distance. More... | |
| bool | mParametersChanged |
| marks if the parameters changed. More... | |
| SimpleQuaternion | mPivotPointOrientation |
| the orientation of the pivot point. More... | |
| SimpleVector3 | mPivotPointPosition |
| the position of the pivot point. More... | |
| float | recognizerCosts |
| The time it takes to recognize an object (in seconds) More... | |
Detailed Description
CameraModelFilter class was built to generalize the filtering for different camera models.
- Date
- 2014
- Version
- 1.0
- Copyright
- GNU Public License
Definition at line 36 of file CameraModelFilter.hpp.
Constructor & Destructor Documentation
| next_best_view::CameraModelFilter::CameraModelFilter | ( | ) |
constructs a new camera model filter.
Definition at line 23 of file CameraModelFilter.cpp.
|
pure virtual |
destructs the camera model filter.
Definition at line 26 of file CameraModelFilter.cpp.
Member Function Documentation
|
staticprotected |
convenience function to get a camera pose matrix.
- Parameters
-
position [in] the position of the camera orientation [in] the orientation of the camera
Definition at line 61 of file CameraModelFilter.cpp.
| double next_best_view::CameraModelFilter::getFarClippingPlane | ( | ) |
- Returns
- the far clipping distance
Definition at line 100 of file CameraModelFilter.cpp.
| double next_best_view::CameraModelFilter::getHorizontalFOV | ( | ) |
- Returns
- the fov in degrees
Definition at line 73 of file CameraModelFilter.cpp.
| double next_best_view::CameraModelFilter::getNearClippingPlane | ( | ) |
- Returns
- the near clipping distance
Definition at line 91 of file CameraModelFilter.cpp.
| SimpleQuaternion next_best_view::CameraModelFilter::getOrientation | ( | ) |
- Returns
- the orientation of the pivot point as quaternion
Definition at line 57 of file CameraModelFilter.cpp.
| SimpleVector3 next_best_view::CameraModelFilter::getPivotPointPosition | ( | ) |
- Returns
- the position of the pivot point
Definition at line 48 of file CameraModelFilter.cpp.
|
virtual |
- Parameters
-
objectType the object to recognize.
- Returns
- the costs of the recognition of the object
Definition at line 34 of file CameraModelFilter.cpp.
| double next_best_view::CameraModelFilter::getVerticalFOV | ( | ) |
- Returns
- the fov in degrees
Definition at line 82 of file CameraModelFilter.cpp.
|
pure virtual |
returns a array of markers containing the visualization of the camera frustum.
- Parameters
-
sequence [in / out] a number used for unique identifying of the markers in the array lifetime the lifetime of each marker
- Returns
- the visualization for that camera filter setting
Implemented in next_best_view::StereoCameraModelFilter, and next_best_view::SingleCameraModelFilter.
|
inline |
- Returns
- if the parameters changed
Definition at line 113 of file CameraModelFilter.hpp.
| void next_best_view::CameraModelFilter::setFarClippingPlane | ( | double | fcp | ) |
sets the far clipping plane. fcp the far clipping distance
Definition at line 95 of file CameraModelFilter.cpp.
| void next_best_view::CameraModelFilter::setHorizontalFOV | ( | double | fovDegrees | ) |
sets the horizontal field of view.
- Parameters
-
fov the field of view in degrees
Definition at line 68 of file CameraModelFilter.cpp.
| void next_best_view::CameraModelFilter::setNearClippingPlane | ( | double | ncp | ) |
sets the near clipping plane.
- Parameters
-
ncp the near clipping distance
Definition at line 86 of file CameraModelFilter.cpp.
| void next_best_view::CameraModelFilter::setOrientation | ( | const SimpleQuaternion & | orientation | ) |
sets the orientation of the pivot point
- Parameters
-
orientation [in] a quaternion which denotes the orientation
Definition at line 52 of file CameraModelFilter.cpp.
|
inline |
- Parameters
-
value set to changed or not.
Definition at line 120 of file CameraModelFilter.hpp.
| void next_best_view::CameraModelFilter::setPivotPointPose | ( | const SimpleVector3 & | position, |
| const SimpleQuaternion & | orientation | ||
| ) |
sets the pose of the pivot point.
- Parameters
-
position [in] a 3d vector pointing to a position orientation [in] a quaternion which denotes the orientation
Definition at line 38 of file CameraModelFilter.cpp.
| void next_best_view::CameraModelFilter::setPivotPointPosition | ( | const SimpleVector3 & | position | ) |
sets the position of the pivot point.
- Parameters
-
position [in] a 3d vector pointing to a position
Definition at line 43 of file CameraModelFilter.cpp.
|
virtual |
- Parameters
-
recognizerCosts the costs of the recognition of the object objectType the object to recognize.
Definition at line 28 of file CameraModelFilter.cpp.
| void next_best_view::CameraModelFilter::setVerticalFOV | ( | double | fovDegrees | ) |
sets the vertical field of view.
- Parameters
-
fov the field of view in degrees
Definition at line 77 of file CameraModelFilter.cpp.
Member Data Documentation
|
private |
the far clipping distance.
Definition at line 61 of file CameraModelFilter.hpp.
|
private |
the horizontal field of view.
Definition at line 46 of file CameraModelFilter.hpp.
|
private |
the vertical field of view.
Definition at line 51 of file CameraModelFilter.hpp.
|
private |
the near clipping distance.
Definition at line 56 of file CameraModelFilter.hpp.
|
private |
marks if the parameters changed.
Definition at line 41 of file CameraModelFilter.hpp.
|
private |
the orientation of the pivot point.
Definition at line 71 of file CameraModelFilter.hpp.
|
private |
the position of the pivot point.
Definition at line 66 of file CameraModelFilter.hpp.
|
private |
The time it takes to recognize an object (in seconds)
Definition at line 76 of file CameraModelFilter.hpp.
The documentation for this class was generated from the following files: