#include <string>#include <cstdlib>#include <vector>#include <list>#include <utility>#include <vecmath.h>
Include dependency graph for utils.h:

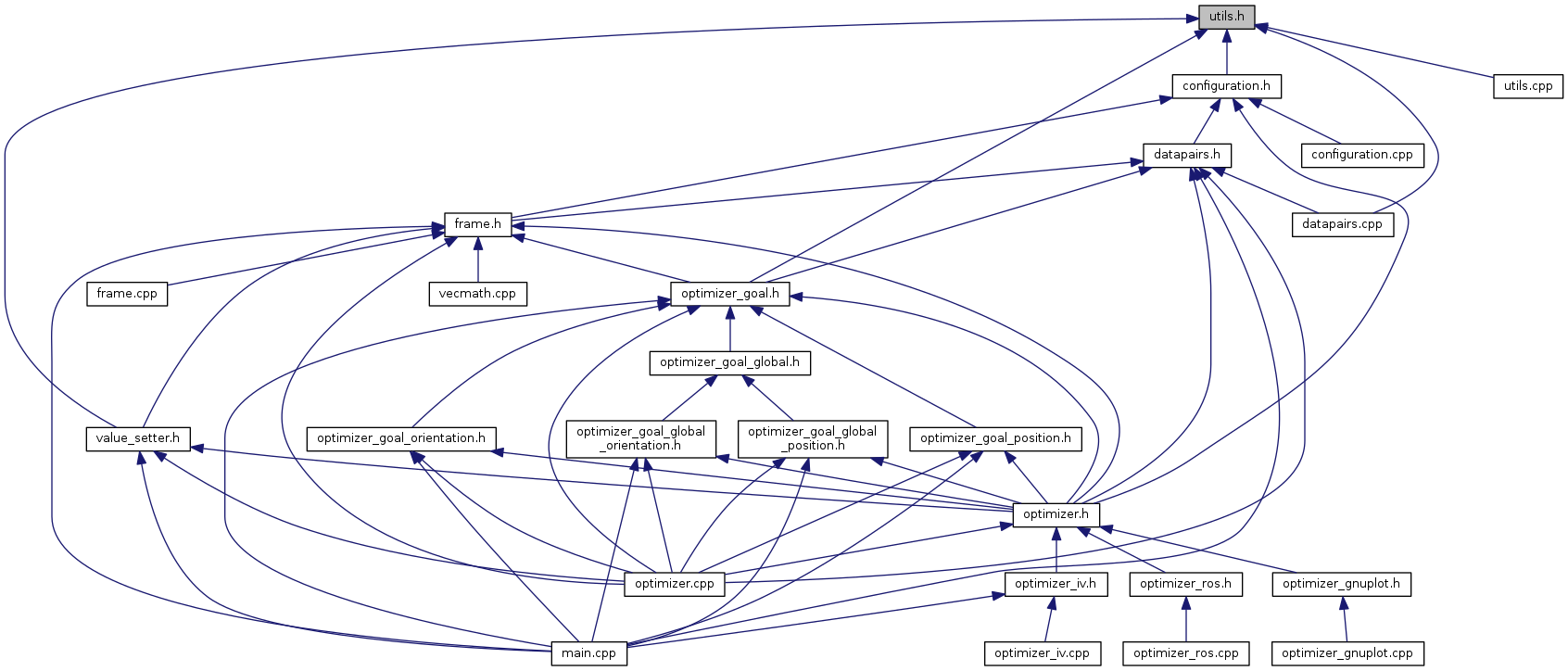
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| robotLibPbD | |
Functions | |
| void | robotLibPbD::arrayToMatrix (CMatrix &matrix, std::vector< double > &values) |
| template<typename T > | |
| std::string | robotLibPbD::arrayToString (std::vector< T > &array) |
| std::string | robotLibPbD::boolToString (bool value) |
| std::string | robotLibPbD::combineStrings (std::vector< std::string > &input, std::string delimiter=" ") |
| template<typename T , typename S > | |
| bool | robotLibPbD::comparePairs (const std::pair< T, S > &first, const std::pair< T, S > &second) |
| template<typename T , typename S > | |
| bool | robotLibPbD::comparePairsVector (const std::pair< T, S > &first, const std::pair< T, S > &second) |
| void | robotLibPbD::getConvexHullXY (std::vector< CVec > &points, std::vector< CVec > &hull) |
| int | robotLibPbD::getDirectoryFiles (std::string dir, std::vector< std::string > &files, bool appendDir=false) |
| unsigned long | robotLibPbD::getTickCount () |
| template<typename T > | |
| bool | robotLibPbD::inRange (std::vector< T > &array, T min, T max) |
| template<typename T > | |
| bool | robotLibPbD::isIncluded (std::vector< T > &array, T &value) |
| void | robotLibPbD::matrixToArray (const CMatrix &matrix, std::vector< double > &values) |
| void | robotLibPbD::matrixToVector (const CMatrix &matrix, std::vector< double > &values) |
| void | robotLibPbD::matrixToVector6 (const CMatrix &matrix, double *values) |
| std::string | robotLibPbD::printToString (const char *format,...) |
| bool | robotLibPbD::stringEndsWith (std::string text, std::string end, std::string sep="_") |
| bool | robotLibPbD::stringStartsWith (std::string text, std::string end, std::string sep="_") |
| std::string | robotLibPbD::strreplace (const std::string &stringSearchString, const std::string &stringReplaceString, std::string stringStringToReplace) |
| void | robotLibPbD::strreplace (char *text, char what= '.', char with= ',') |
| void | robotLibPbD::strreplaceWithCondition (const std::string &stringSearchString, const std::string &stringReplaceString, std::string &stringStringToReplace, std::string condition="") |
| void | robotLibPbD::strToArray (std::string text, std::vector< double > &result, std::string delimiter=" ") |
| double | robotLibPbD::strToDouble (const char *text, double value=0.0) |
| void | robotLibPbD::strtokenize (const std::string &str, std::vector< std::string > &tokens, const std::string &delimiters) |
| std::string | robotLibPbD::strtrim (std::string &s, const std::string &drop=" ") |
| void | robotLibPbD::vectorToMatrix (CMatrix &matrix, const std::vector< double > &values) |
| void | robotLibPbD::vectorToMatrix6 (CMatrix &matrix, const double *values) |
| std::string | robotLibPbD::waitForReturn (std::string msg="Press any key.\n") |