Configuration
Overview
The stereo_image_proc.launch.py launch file provides a full example and
performs rectification and de-mosaicing of raw stereo camera image pairs.
It also perform stereo processing to generate disparity images and point clouds.
In topic names below, left and right are remapped using the left_namespace
and right_namespace launch file parameters.
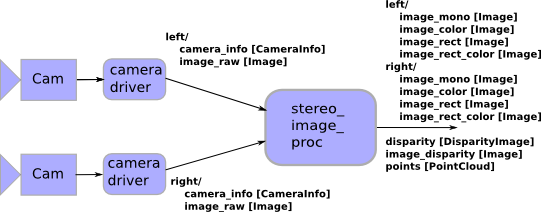
All processing is on demand. Color processing is performed only if there is a
subscriber to a color topic. Rectification is performed only if there is a
subscriber to a rectified topic. Disparities and point clouds are generated
only if there is a subscriber to a relevant topic. While there are no subscribers
to output topics, the nodes unsubscribe from the image_raw and
camera_info topics.
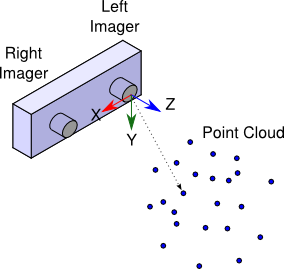
Point clouds are generated in the optical frame of the left imager (X Right, Y Down, Z out):
Quick Start
Make sure your stereo camera driver(s) are running. You can check
ros2 topic list | grep image_raw to see the available raw image
topics from compatible drivers.
To get rectified and/or colorized image streams, you need to launch the
stereo_image_proc.launch.py launch file. If you are running on a
robot, it’s probably best to run the launch file there. For example,
if your stereo camera driver(s) are publishing:
/stereo/left/image_raw
/stereo/left/camera_info
/stereo/right/image_raw
/stereo/right/camera_info
you could do:
ros2 launch stereo_image_proc stereo_image_proc.launch.py namespace:=stereo
Notice that we add the stereo namespace. Internally the launch file
also has a left_namespace and right_namespace which default to
left and right. Using this launch file is equivalent to Launching
two instances of the image_proc/image_proc.launch.py launch file in the
stereo/left and stereo/right namespaces, with the addition of
the stereo outputs: disparity images (stereo/disparity topic) and point
clouds (stereo/points2 topic)
In a separate terminal (on your home machine, if you are running on a robot):
$ ros2 run image_view image_view image:=/stereo/left/image_rect_color
This will display a rectified color image from the left stereo camera. Alternatively, stereo_view will show you both the left and right images as well as a color-mapped disparity image:
$ ros2 run image_view stereo_view stereo:=/stereo image:=image_rect_color
To view point clouds, you can use rviz2.
Choosing Good Stereo Parameters
There is an extensive tutorial on the ROS 1 wiki <http://wiki.ros.org/stereo_image_proc/Tutorials/ChoosingGoodStereoParameters>, however not all components exist in ROS 2 yet.