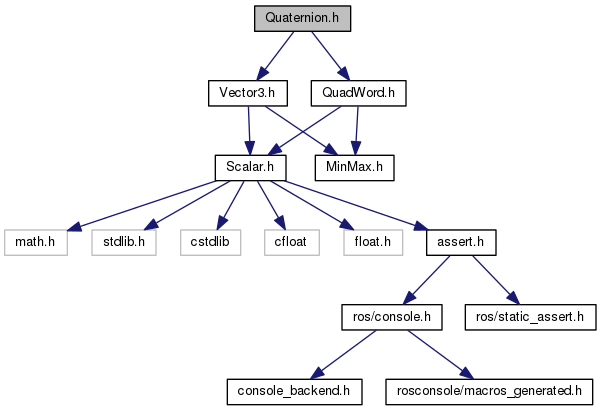
Include dependency graph for Quaternion.h:
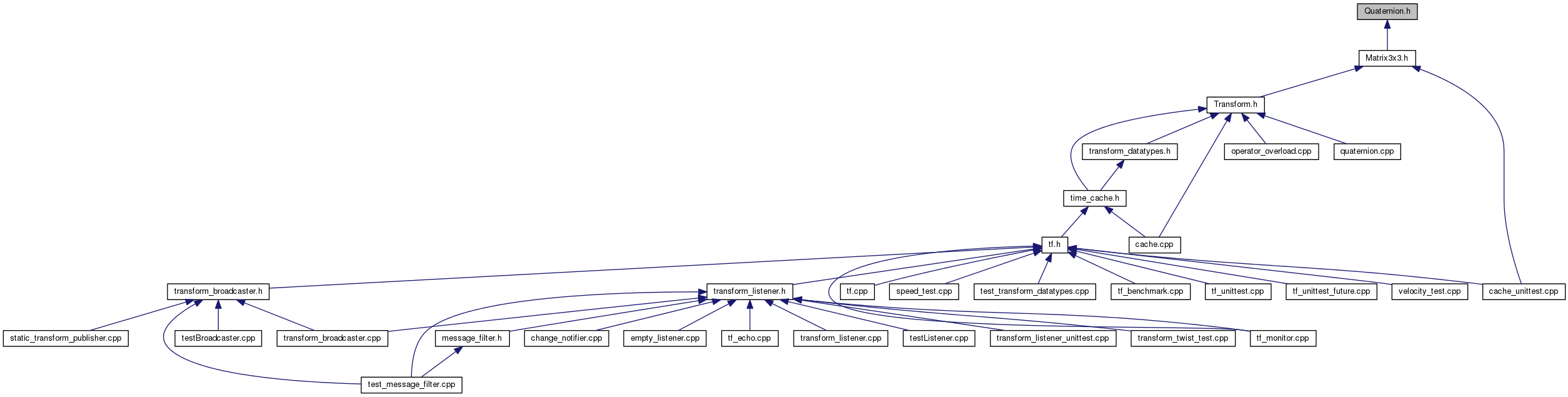
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | tf::Quaternion |
| The Quaternion implements quaternion to perform linear algebra rotations in combination with Matrix3x3, Vector3 and Transform. More... | |
Namespaces | |
| namespace | tf |
Functions | |
| TFSIMD_FORCE_INLINE tfScalar | tf::angle (const Quaternion &q1, const Quaternion &q2) |
| Return the ***half*** angle between two quaternions. | |
| TFSIMD_FORCE_INLINE tfScalar | tf::angleShortestPath (const Quaternion &q1, const Quaternion &q2) |
| Return the shortest angle between two quaternions. | |
| TFSIMD_FORCE_INLINE tfScalar | tf::dot (const Quaternion &q1, const Quaternion &q2) |
| Calculate the dot product between two quaternions. | |
| TFSIMD_FORCE_INLINE Quaternion | tf::inverse (const Quaternion &q) |
| Return the inverse of a quaternion. | |
| TFSIMD_FORCE_INLINE tfScalar | tf::length (const Quaternion &q) |
| Return the length of a quaternion. | |
| TFSIMD_FORCE_INLINE Quaternion | tf::operator* (const Quaternion &q1, const Quaternion &q2) |
| Return the product of two quaternions. | |
| TFSIMD_FORCE_INLINE Quaternion | tf::operator* (const Quaternion &q, const Vector3 &w) |
| TFSIMD_FORCE_INLINE Quaternion | tf::operator* (const Vector3 &w, const Quaternion &q) |
| TFSIMD_FORCE_INLINE Quaternion | tf::operator- (const Quaternion &q) |
| Return the negative of a quaternion. | |
| TFSIMD_FORCE_INLINE Vector3 | tf::quatRotate (const Quaternion &rotation, const Vector3 &v) |
| TFSIMD_FORCE_INLINE Quaternion | tf::shortestArcQuat (const Vector3 &v0, const Vector3 &v1) |
| TFSIMD_FORCE_INLINE Quaternion | tf::shortestArcQuatNormalize2 (Vector3 &v0, Vector3 &v1) |
| TFSIMD_FORCE_INLINE Quaternion | tf::slerp (const Quaternion &q1, const Quaternion &q2, const tfScalar &t) |
| Return the result of spherical linear interpolation betwen two quaternions. | |