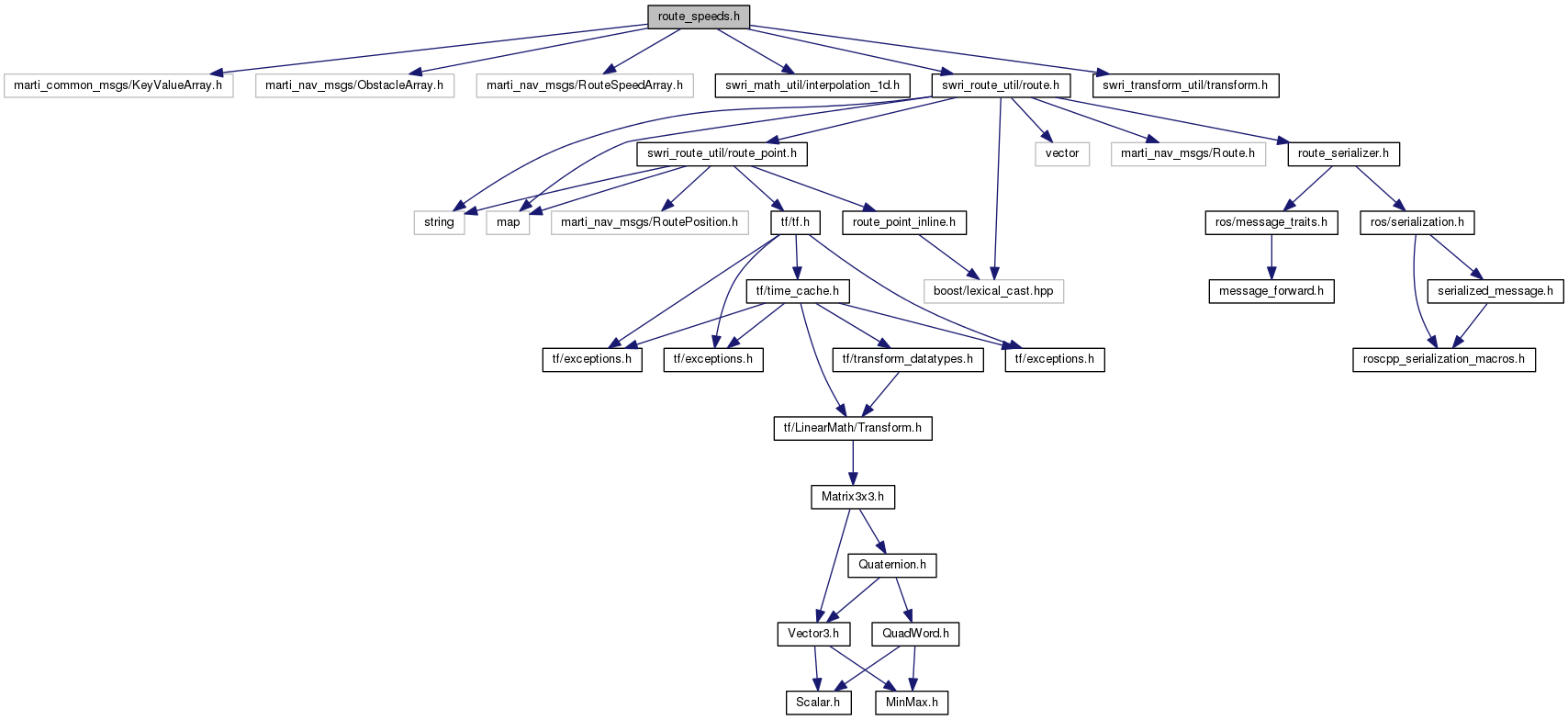
#include <marti_common_msgs/KeyValueArray.h>#include <marti_nav_msgs/ObstacleArray.h>#include <marti_nav_msgs/RouteSpeedArray.h>#include <swri_math_util/interpolation_1d.h>#include <swri_route_util/route.h>#include <swri_transform_util/transform.h>
Include dependency graph for route_speeds.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | swri_route_util::DistanceReport |
| struct | swri_route_util::ObstacleData |
| struct | swri_route_util::SpeedForCurvatureParameters |
| struct | swri_route_util::SpeedForObstaclesParameters |
Namespaces | |
| namespace | swri_route_util |
Functions | |
| void | swri_route_util::generateObstacleData (std::vector< ObstacleData > &obstacle_data, const swri_transform_util::Transform g_route_from_obs, const marti_nav_msgs::ObstacleArray &obstacles_msg) |
| void | swri_route_util::speedsForCurvature (marti_nav_msgs::RouteSpeedArray &speeds, const Route &route, const SpeedForCurvatureParameters ¶meters) |
| void | swri_route_util::speedsForObstacles (marti_nav_msgs::RouteSpeedArray &speeds, std::vector< DistanceReport > &reports, const Route &route, const marti_nav_msgs::RoutePosition &route_position, const std::vector< ObstacleData > &obstacles, const SpeedForObstaclesParameters ¶meters) |