A wrapper around a graspdb GrapsModel with a PCL point cloud. More...
Include dependency graph for PCLGraspModel.cpp:
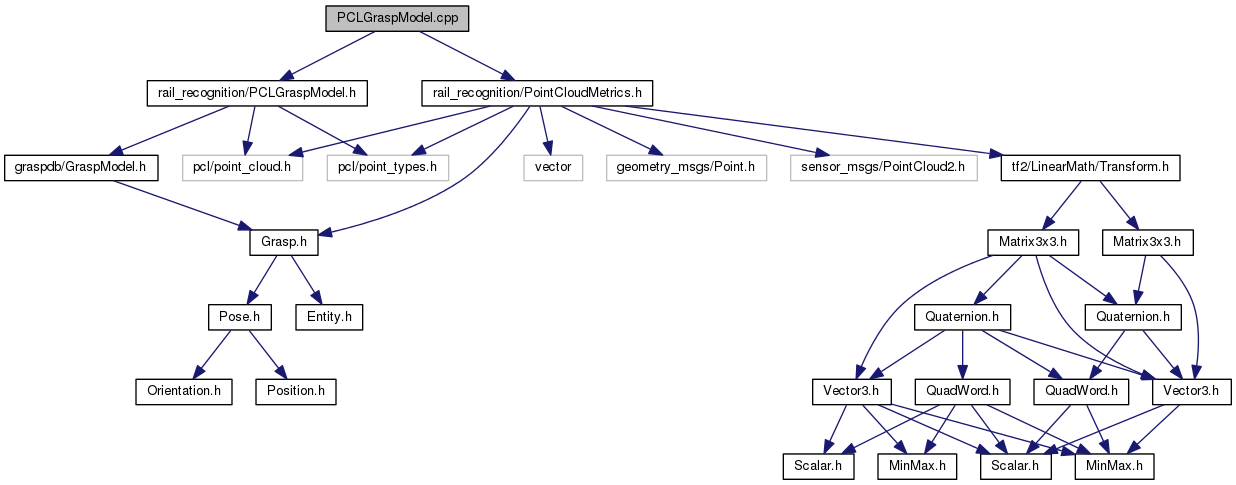
Go to the source code of this file.
Detailed Description
A wrapper around a graspdb GrapsModel with a PCL point cloud.
The PCLGraspModel is simply a wrapper around the graspdb GrapsModel with a PCL point cloud. A flag can also be set to mark the grasp model as an original (as apposed to newly generated during model generation). All accessors to the ROS point cloud message are disabled.
- Date:
- April 8, 2015
Definition in file PCLGraspModel.cpp.