The grasp model generator node object. More...
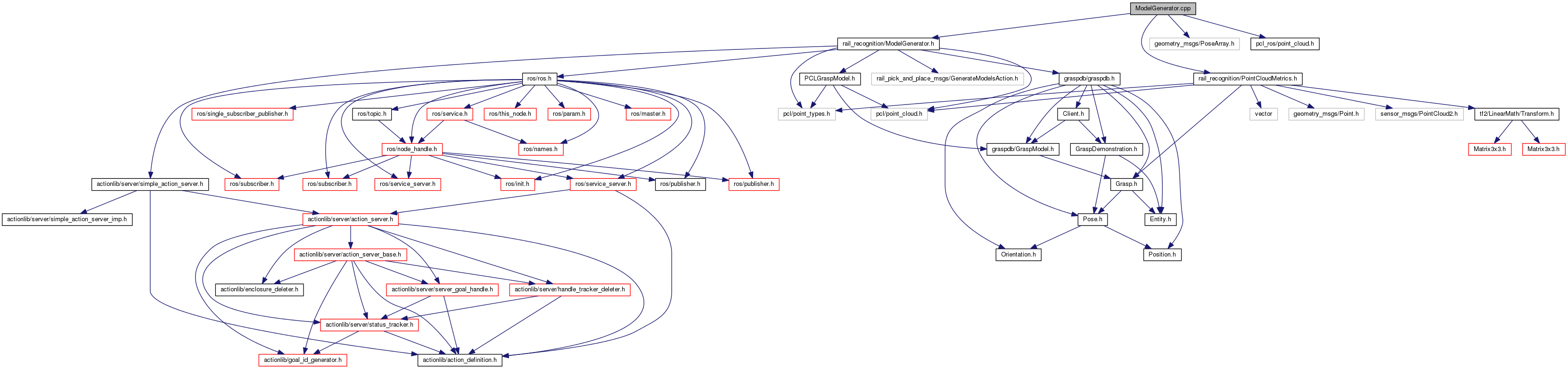
#include "rail_recognition/ModelGenerator.h"#include "rail_recognition/PointCloudMetrics.h"#include <geometry_msgs/PoseArray.h>#include <pcl_ros/point_cloud.h>
Include dependency graph for ModelGenerator.cpp:
Go to the source code of this file.
Detailed Description
The grasp model generator node object.
The grasp model generator allows for generating graspdb models based on registration criteria. An action server is used to provide the model/grasp demonstration IDs to use during registration.
- Date:
- April 6, 2015
Definition in file ModelGenerator.cpp.