#include <moveit/macros/class_forward.h>#include <moveit/occupancy_map_monitor/occupancy_map.h>#include <geometric_shapes/shapes.h>#include <boost/shared_ptr.hpp>#include <Eigen/Core>#include <Eigen/Geometry>
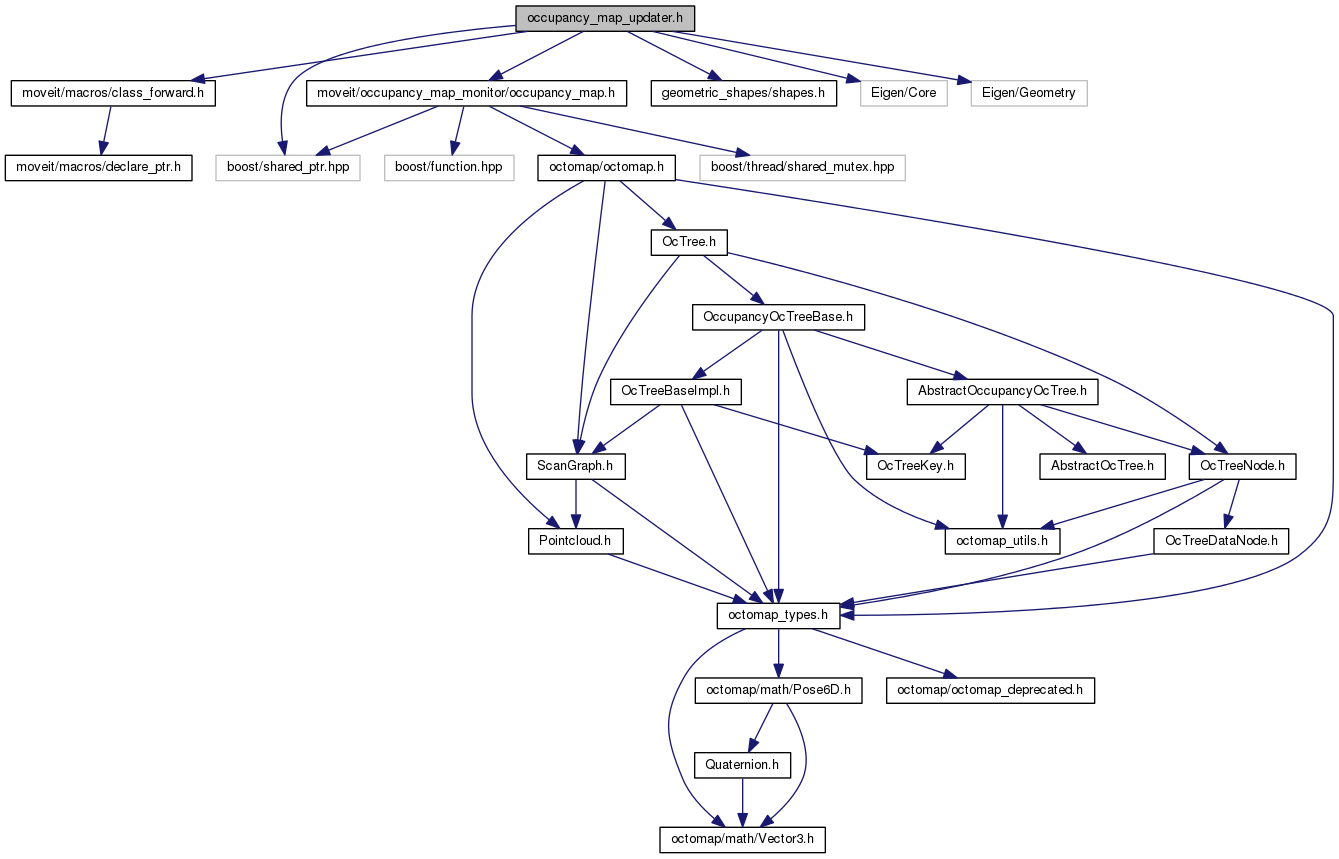
Include dependency graph for occupancy_map_updater.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | occupancy_map_monitor::OccupancyMapUpdater |
| Base class for classes which update the occupancy map. More... | |
Namespaces | |
| namespace | occupancy_map_monitor |
Typedefs | |
| typedef unsigned int | occupancy_map_monitor::ShapeHandle |
| typedef std::map< ShapeHandle, Eigen::Affine3d, std::less < ShapeHandle > , Eigen::aligned_allocator < std::pair< const ShapeHandle, Eigen::Affine3d > > > | occupancy_map_monitor::ShapeTransformCache |
| typedef boost::function< bool(const std::string &target_frame, const ros::Time &target_time, ShapeTransformCache &cache)> | occupancy_map_monitor::TransformCacheProvider |
Functions | |
| occupancy_map_monitor::MOVEIT_CLASS_FORWARD (OccupancyMapUpdater) | |