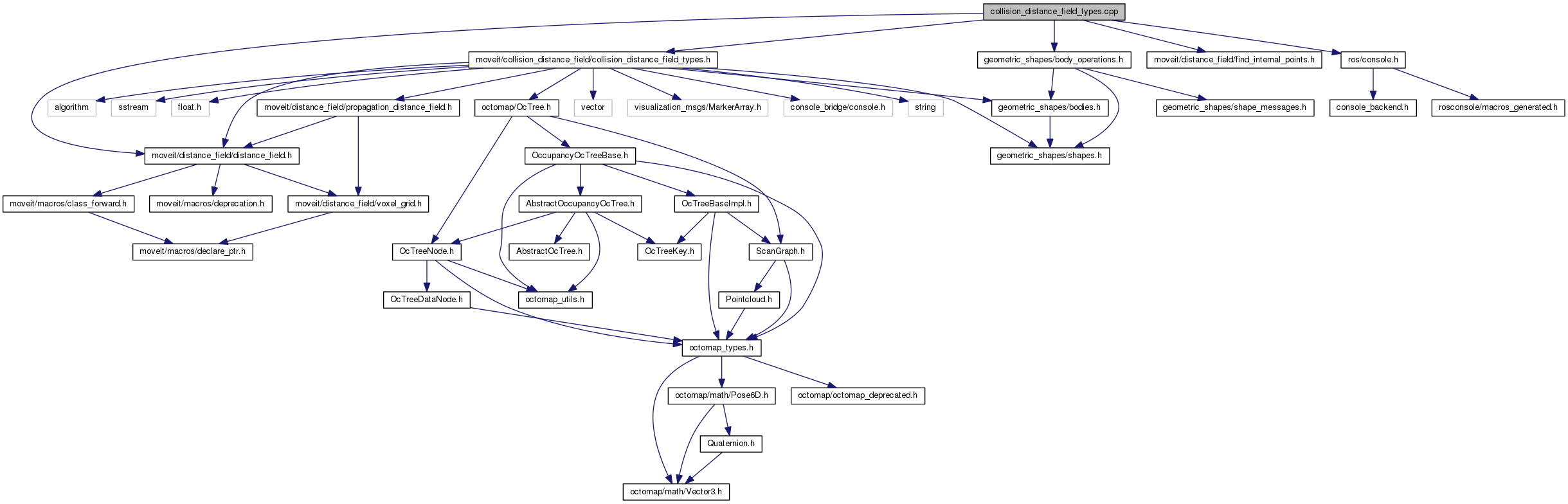
#include <moveit/collision_distance_field/collision_distance_field_types.h>#include <geometric_shapes/body_operations.h>#include <moveit/distance_field/distance_field.h>#include <moveit/distance_field/find_internal_points.h>#include <ros/console.h>
Include dependency graph for collision_distance_field_types.cpp:
Go to the source code of this file.
Variables | |
| static const double | EPSILON = 0.0001 |
| static const double | RESOLUTION_SCALE = 1.0 |
Variable Documentation
const double EPSILON = 0.0001 [static] |
Definition at line 44 of file collision_distance_field_types.cpp.
const double RESOLUTION_SCALE = 1.0 [static] |
Definition at line 43 of file collision_distance_field_types.cpp.