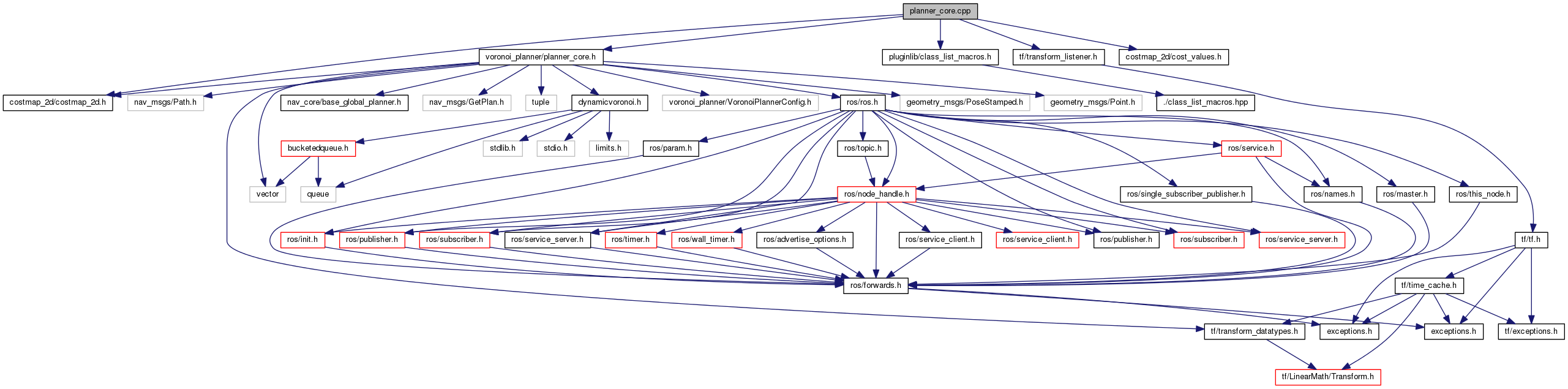
#include <voronoi_planner/planner_core.h>#include <pluginlib/class_list_macros.h>#include <tf/transform_listener.h>#include <costmap_2d/cost_values.h>#include <costmap_2d/costmap_2d.h>
Include dependency graph for planner_core.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | voronoi_planner |
Functions | |
| void | voronoi_planner::visualize (const char *filename, DynamicVoronoi *voronoi, bool **map, std::vector< std::pair< float, float > > *path) |