The goal of this ROS publisher is to publish relevant data concerning the hand at a regular time interval. Those data are (not exhaustive): positions, targets, temperatures, currents, forces, error flags, ... More...
#include <ros/ros.h>#include <sr_robot_msgs/joints_data.h>#include <sr_robot_msgs/joint.h>#include <sensor_msgs/JointState.h>#include <vector>#include <string>#include <sstream>#include "sr_hand/sr_publisher.h"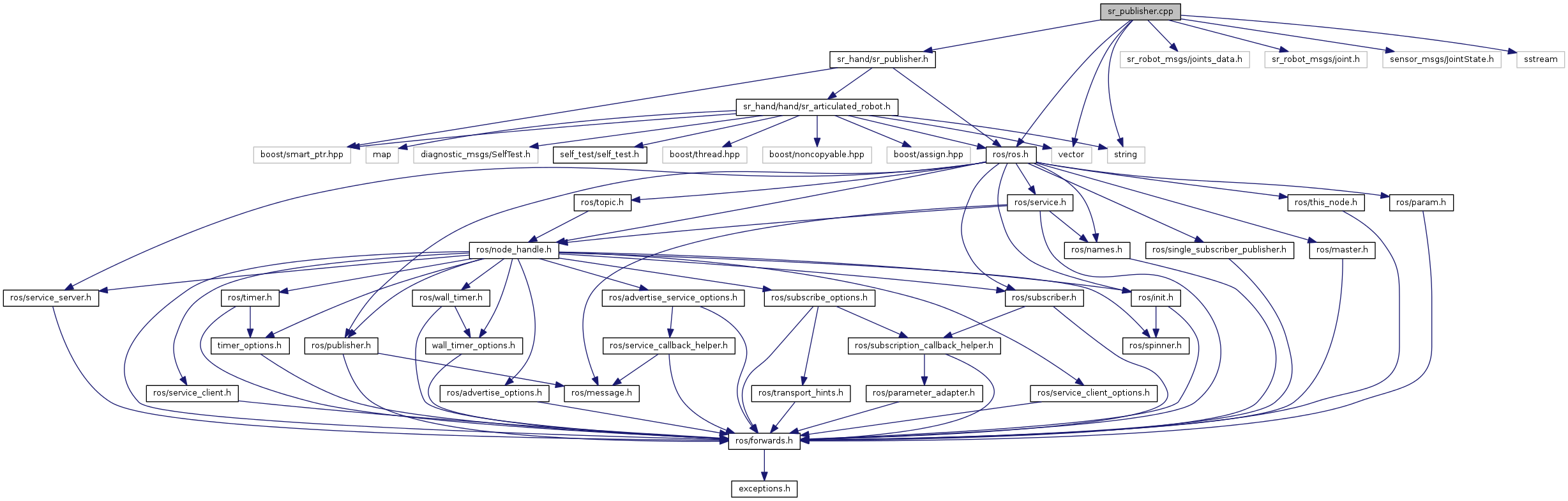
Go to the source code of this file.
Namespaces | |
| namespace | shadowrobot |
Detailed Description
The goal of this ROS publisher is to publish relevant data concerning the hand at a regular time interval. Those data are (not exhaustive): positions, targets, temperatures, currents, forces, error flags, ...
- Date:
- Thu Mar 25 15:36:41 2010
Copyright 2011 Shadow Robot Company Ltd.
This program is free software: you can redistribute it and/or modify it under the terms of the GNU General Public License as published by the Free Software Foundation, either version 2 of the License, or (at your option) any later version.
This program is distributed in the hope that it will be useful, but WITHOUT ANY WARRANTY; without even the implied warranty of MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU General Public License for more details.
You should have received a copy of the GNU General Public License along with this program. If not, see <http://www.gnu.org/licenses/>.
Definition in file sr_publisher.cpp.