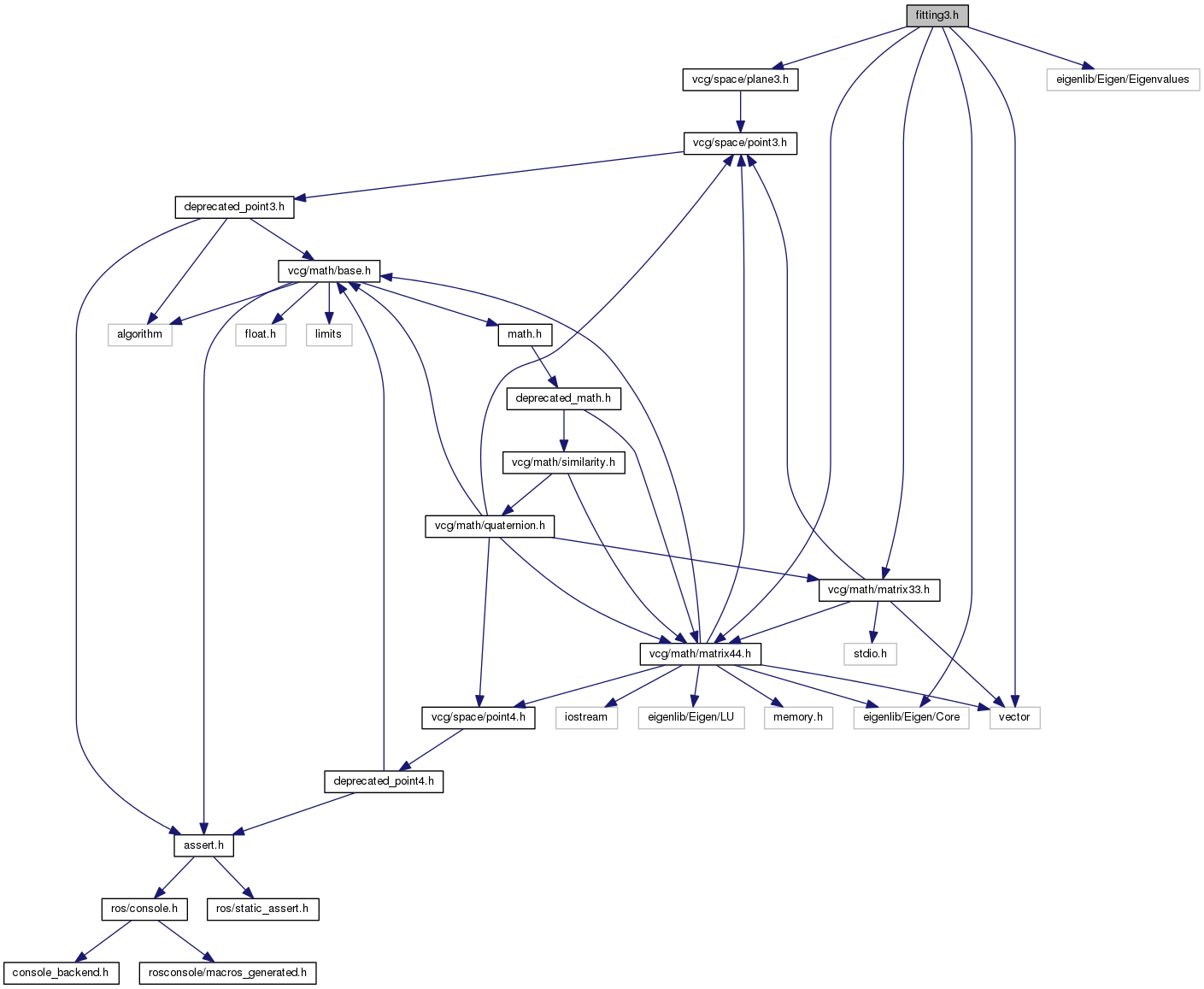
#include <vector>#include <vcg/space/plane3.h>#include <vcg/math/matrix44.h>#include <vcg/math/matrix33.h>#include <eigenlib/Eigen/Core>#include <eigenlib/Eigen/Eigenvalues>
Include dependency graph for fitting3.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Namespaces | |
| namespace | vcg |
* | |
Functions | |
| template<class S > | |
| void | vcg::ComputeCovarianceMatrix (const std::vector< Point3< S > > &pointVec, Point3< S > &barycenter, Eigen::Matrix< S, 3, 3 > &m) |
| compute the covariance matrix of a set of point | |
| template<class S > | |
| void | vcg::ComputeWeightedCovarianceMatrix (const std::vector< Point3< S > > &pointVec, const std::vector< S > &weightVec, Point3< S > &bp, Eigen::Matrix< S, 3, 3 > &m) |
| compute the weighted covariance matrix of a set of point | |
| template<class S > | |
| void | vcg::FitPlaneToPointSet (const std::vector< Point3< S > > &pointVec, Plane3< S > &plane) |
| Compute the plane best fitting a set of points. | |
| template<class S > | |
| void | vcg::WeightedFitPlaneToPointSet (const std::vector< Point3< S > > &pointVec, const std::vector< S > &weightVec, Plane3< S > &plane) |
| Compute the plane best fitting a set of points. | |