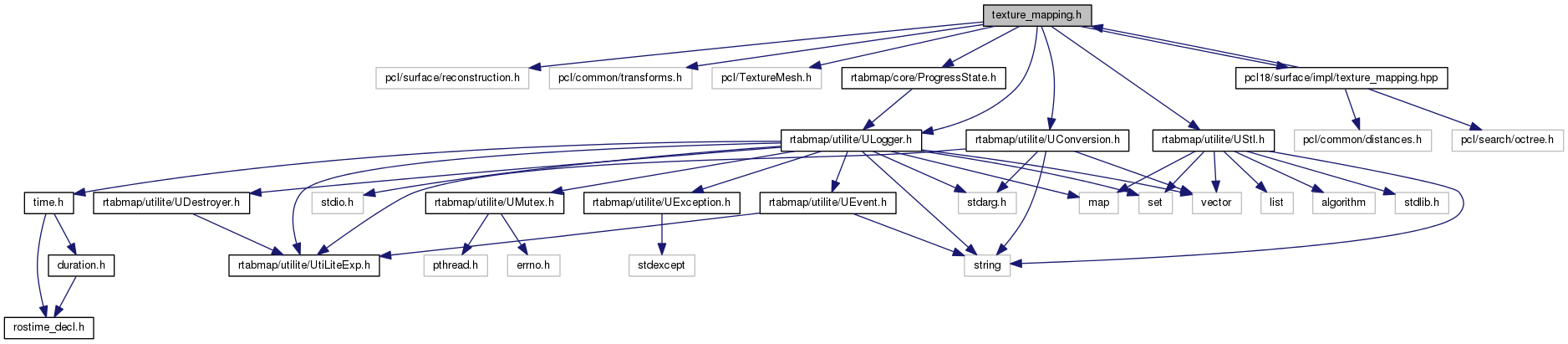
#include <pcl/surface/reconstruction.h>#include <pcl/common/transforms.h>#include <pcl/TextureMesh.h>#include <rtabmap/core/ProgressState.h>#include <rtabmap/utilite/ULogger.h>#include <rtabmap/utilite/UStl.h>#include <rtabmap/utilite/UConversion.h>#include <pcl18/surface/impl/texture_mapping.hpp>
Include dependency graph for texture_mapping.h:
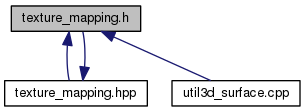
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | pcl::texture_mapping::Camera |
| Structure to store camera pose and focal length. More... | |
| class | pcl::TextureMapping< PointInT > |
| The texture mapping algorithm. More... | |
| struct | pcl::texture_mapping::UvIndex |
| Structure that links a uv coordinate to its 3D point and face. More... | |
Namespaces | |
| namespace | pcl |
| namespace | pcl::texture_mapping |
Typedefs | |
| typedef std::vector< Camera, Eigen::aligned_allocator < Camera > > | pcl::texture_mapping::CameraVector |