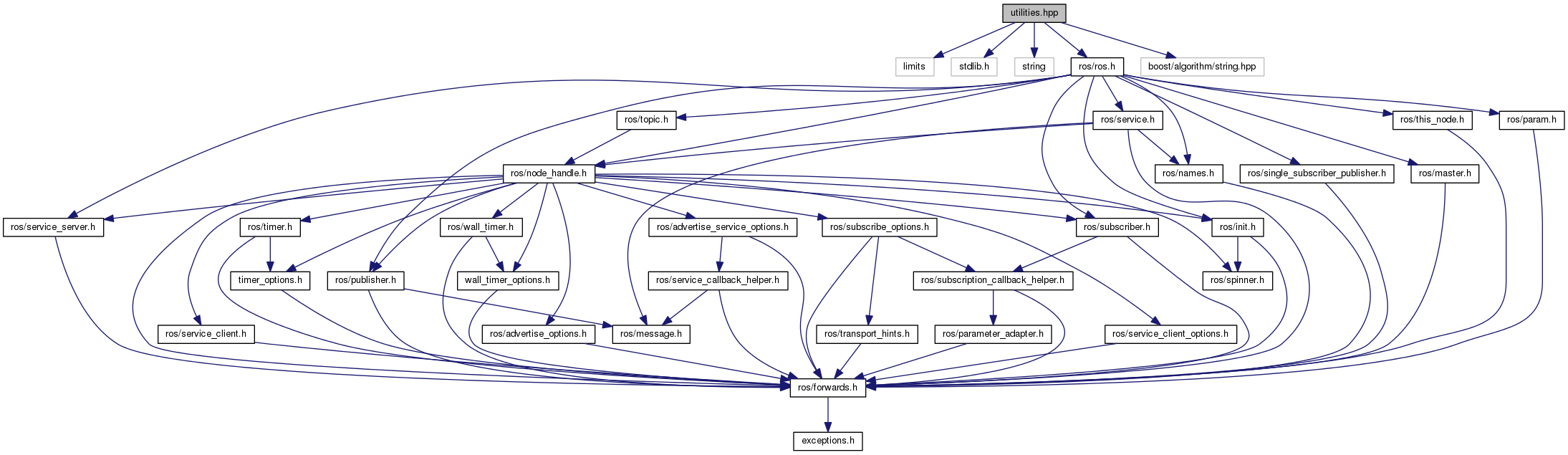
#include <limits>#include <stdlib.h>#include <string>#include <ros/ros.h>#include <boost/algorithm/string.hpp>
Include dependency graph for utilities.hpp:
Go to the source code of this file.
Namespaces | |
| namespace | rosparam_handler |
Functions | |
| void | rosparam_handler::exit (const std::string msg="Runtime Error in rosparam handler.") |
| ExitFunction for rosparam_handler. | |
| std::string | rosparam_handler::getNodeName (const ros::NodeHandle &privateNodeHandle) |
| Retrieve node name. | |
| template<typename T > | |
| bool | rosparam_handler::getParam (const std::string key, T &val) |
| Get parameter from ROS parameter server. | |
| template<typename T > | |
| bool | rosparam_handler::getParam (const std::string key, T &val, const T &defaultValue) |
| Get parameter from ROS parameter server or use default value. | |
| void | rosparam_handler::setLoggerLevel (const ros::NodeHandle &nodeHandle) |
| Sets the logger level according to a standardized parameter name 'verbosity'. | |
| template<typename T > | |
| void | rosparam_handler::setParam (const std::string key, T val) |
| Set parameter on ROS parameter server. | |
| void | rosparam_handler::showNodeInfo () |
| Show summary about node containing name, namespace, subscribed and advertised topics. | |
| bool | rosparam_handler::testConstParam (const std::string key) |
| Tests that parameter is not set on the parameter server. | |
| template<typename T > | |
| void | rosparam_handler::testMax (const std::string key, T &val, T max=std::numeric_limits< T >::max()) |
| Limit parameter to upper bound if parameter is a scalar. | |
| template<typename T > | |
| void | rosparam_handler::testMax (const std::string key, std::vector< T > &val, T max=std::numeric_limits< T >::max()) |
| Limit parameter to upper bound if parameter is a vector. | |
| template<typename K , typename T > | |
| void | rosparam_handler::testMax (const std::string key, std::map< K, T > &val, T max=std::numeric_limits< T >::max()) |
| Limit parameter to upper bound if parameter is a map. | |
| template<typename T > | |
| void | rosparam_handler::testMin (const std::string key, T &val, T min=std::numeric_limits< T >::min()) |
| Limit parameter to lower bound if parameter is a scalar. | |
| template<typename T > | |
| void | rosparam_handler::testMin (const std::string key, std::vector< T > &val, T min=std::numeric_limits< T >::min()) |
| Limit parameter to lower bound if parameter is a vector. | |
| template<typename K , typename T > | |
| void | rosparam_handler::testMin (const std::string key, std::map< K, T > &val, T min=std::numeric_limits< T >::min()) |
| Limit parameter to lower bound if parameter is a map. | |
| template<typename T > | |
| std::string | rosparam_handler::to_string (const std::vector< T > &v) |
| template<typename... T> | |
| std::string | rosparam_handler::to_string (const std::map< T...> &map) |