#include <iostream>#include <boost/thread.hpp>#include <boost/algorithm/string/join.hpp>#include <thread>#include <cstdlib>#include <cctype>#include <algorithm>#include <sstream>#include <memory>#include <map>#include <queue>#include <unistd.h>#include <signal.h>#include <string>#include <vector>#include <opencv2/core/core.hpp>#include <cv_bridge/cv_bridge.h>#include <opencv2/highgui/highgui.hpp>#include <ros/ros.h>#include <nodelet/nodelet.h>#include <sensor_msgs/PointCloud2.h>#include <sensor_msgs/image_encodings.h>#include <sensor_msgs/point_cloud2_iterator.h>#include <std_msgs/String.h>#include <std_msgs/Float32MultiArray.h>#include <image_transport/image_transport.h>#include <camera_info_manager/camera_info_manager.h>#include <librealsense/rs.hpp>#include <pluginlib/class_list_macros.h>#include <tf/transform_broadcaster.h>#include <tf2_ros/static_transform_broadcaster.h>#include <realsense_camera/CameraConfiguration.h>#include <realsense_camera/IsPowered.h>#include <realsense_camera/SetPower.h>#include <realsense_camera/ForcePower.h>#include <realsense_camera/constants.h>
Include dependency graph for base_nodelet.h:

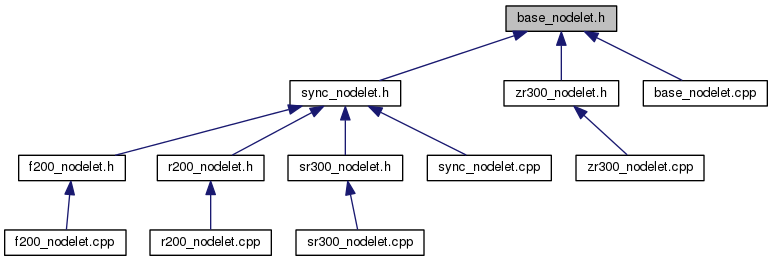
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | realsense_camera::BaseNodelet |
| struct | realsense_camera::BaseNodelet::CameraOptions |
Namespaces | |
| namespace | realsense_camera |