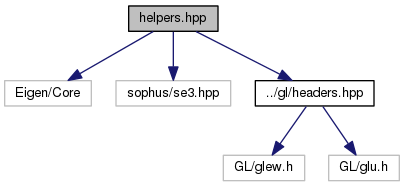
Include dependency graph for helpers.hpp:
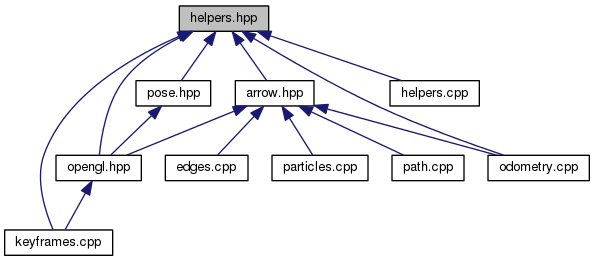
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| namespace | qglv |
Functions | |
| void | qglv::moveTo (const Sophus::SE3f &T) |
| void | qglv::seeWhatISee (const Sophus::SE3f &pose, const unsigned int &image_width, const unsigned int &image_height, const float &focal_length) |
| Configure a gl viewport to see what a camera sees. | |
| template<typename T > | |
| void | qglv::translate (const Eigen::Matrix< T, 3, 1 > &v) |
Detailed Description
Definition in file helpers.hpp.