#include <iostream>#include <string>#include <utility>#include <vector>#include <list>#include <map>#include <set>#include <stdexcept>#include <exception>#include <opencv2/core/core.hpp>#include <opencv2/features2d/features2d.hpp>#include <opencv2/calib3d/calib3d.hpp>#include <pano_core/pano_interfaces.h>#include <pano_core/ImageAtom.h>#include <pano_core/callbacks.h>
Include dependency graph for ModelFitter.h:
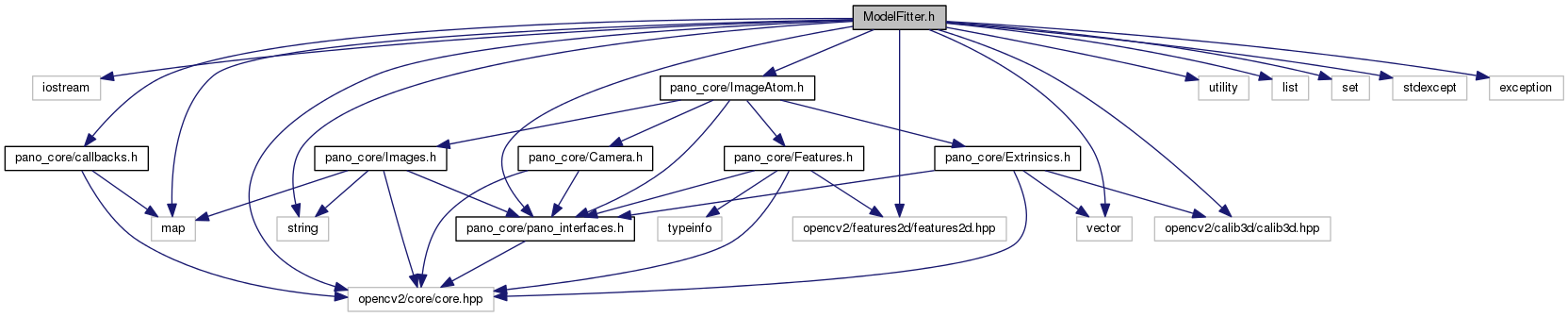
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| struct | pano::AtomPair |
| struct | pano::AtomPairDist |
| struct | pano::AtomPairLess |
| struct | pano::AtomPairMin |
| struct | pano::FitPair |
| class | pano::FitterResult |
| class | pano::GenericModelFitter< Fitter, Params > |
| class | pano::ModelFitter |
| class | pano::ModelFitterParams |
| struct | pano::PairPointsCSV |
| struct | pano::SVDFitR |
| struct | pano::SVDRSolverParams |
Namespaces | |
| namespace | pano |
Typedefs | |
| typedef std::set< AtomPair, AtomPairLess > | pano::AtomPairSet |
| typedef GenericModelFitter < SVDFitR, SVDRSolverParams > | pano::SVDFitter |
Functions | |
| float | pano::calcError (const cv::Point3f &p1, const cv::Point3f &p2, const cv::Mat &R, const cv::Mat &K) |
| float | pano::calcError (const std::vector< cv::Point3f > &pts1, const std::vector< cv::Point3f > &pts2, const std::vector< uchar > &mask, const cv::Mat &R, const cv::Mat &K, int norm_type=cv::NORM_L1) |
| float | pano::calcReprojectonError (const std::vector< cv::Point2f > &pts1, const std::vector< cv::Point2f > &pts2, const std::vector< uchar > &mask, const cv::Mat &R, const cv::Mat &K, int norm_type=cv::NORM_L1) |
| void | pano::convertRTtoG (const cv::Mat &R, const cv::Mat &T, cv::Mat &G) |
| concatenate 3x3 R and 3x1 T into a 4x4 G matrix | |
| void | pano::point2fto3dMat (const cv::Point2f &p1, const cv::Mat &Kinv, cv::Mat &p13d) |
| cv::Mat | pano::point2fto3dMat (const cv::Point2f &p1, const cv::Mat &Kinv) |
| cv::Point3f | pano::point2fTo3f (const cv::Point2f &p1, const cv::Mat &Kinverse) |
| cv::Point2f | pano::point3fTo2f (const cv::Point3f &p1, const cv::Mat &K) |
| template<typename Inserter , typename Begin , typename End > | |
| void | pano::points2fto3f (Begin begin, End end, Inserter it, const cv::Mat &Kinverse) |
| template<typename Inserter , typename Begin , typename End > | |
| void | pano::points3fto2f (Begin begin, End end, Inserter it, const cv::Mat &K) |
| cv::Mat | pano::pt2f_to_3d (const cv::Point2f &p1, const cv::Mat &K) |
| void | pano::sparsifyMatches (const ImageAtom &atom1, const ImageAtom &atom2, std::vector< cv::Point2f > &pts1, std::vector< cv::Point2f > &pts2, int iKeep=50) |
| void | pano::sparsifyMatches (AtomPair &pair, int iKeep=50) |