#include <nav_core2/common.h>#include <nav_2d_utils/conversions.h>#include <geometry_msgs/PoseStamped.h>#include <nav_2d_msgs/Pose2DStamped.h>#include <string>
Include dependency graph for tf_help.h:
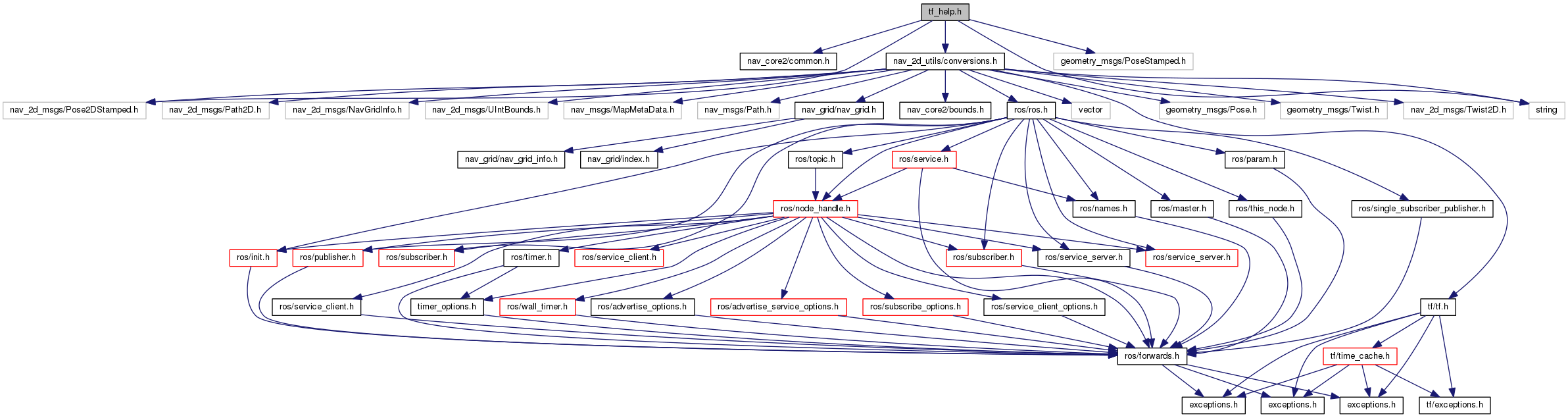
Go to the source code of this file.
Namespaces | |
| namespace | nav_2d_utils |
Functions | |
| bool | nav_2d_utils::transformPose (const TFListenerPtr tf, const std::string frame, const geometry_msgs::PoseStamped &in_pose, geometry_msgs::PoseStamped &out_pose, const bool extrapolation_fallback=true) |
| Transform a PoseStamped from one frame to another while catching exceptions. | |
| bool | nav_2d_utils::transformPose (const TFListenerPtr tf, const std::string frame, const nav_2d_msgs::Pose2DStamped &in_pose, nav_2d_msgs::Pose2DStamped &out_pose, const bool extrapolation_fallback=true) |
| Transform a Pose2DStamped from one frame to another while catching exceptions. | |
| geometry_msgs::Pose2D | nav_2d_utils::transformStampedPose (const TFListenerPtr tf, const nav_2d_msgs::Pose2DStamped &pose, const std::string &frame_id) |