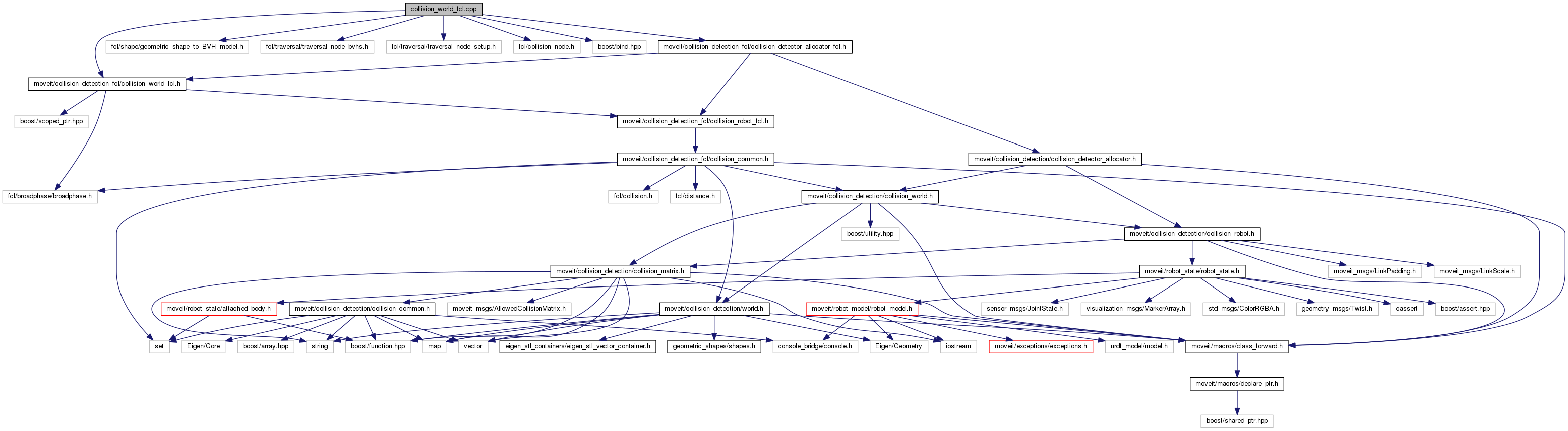
#include <moveit/collision_detection_fcl/collision_world_fcl.h>#include <fcl/shape/geometric_shape_to_BVH_model.h>#include <fcl/traversal/traversal_node_bvhs.h>#include <fcl/traversal/traversal_node_setup.h>#include <fcl/collision_node.h>#include <boost/bind.hpp>#include <moveit/collision_detection_fcl/collision_detector_allocator_fcl.h>
Include dependency graph for collision_world_fcl.cpp: