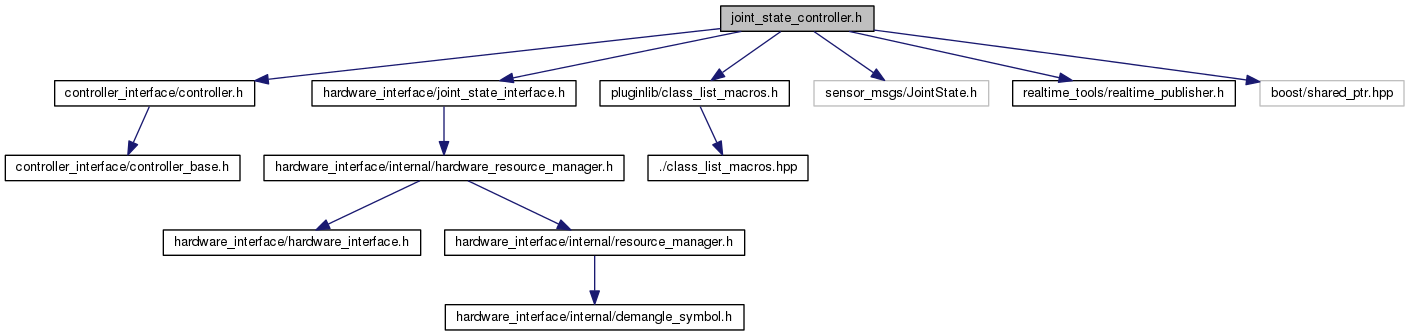
#include <controller_interface/controller.h>#include <hardware_interface/joint_state_interface.h>#include <pluginlib/class_list_macros.h>#include <sensor_msgs/JointState.h>#include <realtime_tools/realtime_publisher.h>#include <boost/shared_ptr.hpp>
Include dependency graph for joint_state_controller.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | joint_state_controller::JointStateController |
| Controller that publishes the state of all joints in a robot. More... | |
Namespaces | |
| namespace | joint_state_controller |