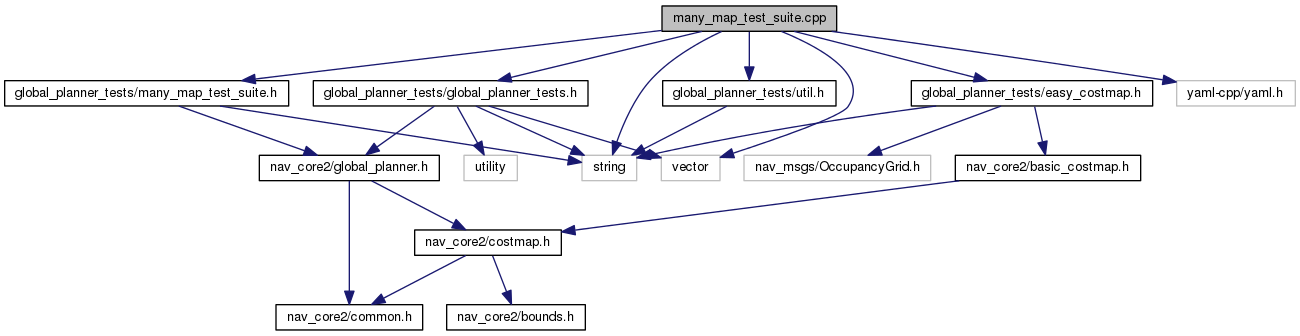
#include <global_planner_tests/many_map_test_suite.h>#include <global_planner_tests/global_planner_tests.h>#include <global_planner_tests/easy_costmap.h>#include <global_planner_tests/util.h>#include <yaml-cpp/yaml.h>#include <string>#include <vector>
Include dependency graph for many_map_test_suite.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | global_planner_tests |
Functions | |
| bool | global_planner_tests::many_map_test_suite (nav_core2::GlobalPlanner &planner, TFListenerPtr tf, const std::string &planner_name, const std::string &maps_list_filename="package://global_planner_tests/config/standard_tests.yaml", bool check_exception_type=true, bool verbose=false, bool quit_early=true) |
| Run a collection of global_planner_tests on the provided maps. | |